
Esperamos poder proporcionarle servicios profesionales--Zhongda Líder


-
-
-
Motor de engranaje de corriente continua
Motor de engranaje sin escobillas de CC
Motor de engranaje de corriente continua planetario
Pequeño motor de engranaje de CA
Motor de engranaje hipoidales ZDF2, ZDF3
Reductor de Rueda de Pin Ciclóide RV
Reductor de transmisión armónica
PRODUCTOS
Caja de engranajes de la serie ZDR
Detalle
■ Tipo y número de modelo
Reductores ZDR Motor servo 
① Tamaño del marco del cabezal de engranaje: ZDR: 52, 78, 98, 125 ② Código de serie del cabezal de engranaje: ZDR: Precisión de diente oblicuo ➂ Relación de engranaje: ZDR: Una etapa 3, 5, 7, 9, 10; Dos etapas 15, 20, 25, 35, 45, 81 Número de tipo de reductor Etapa Tipo estándar Tipo de bajo retroceso Tipo de alta precisión ➃ Cantidad de retroceso 52ZDR 1 12 minutos de arco 10 minutos de arco 3 minutos de arco 2 15 minutos de arco 12 minutos de arco 5 minutos de arco 78ZDR 1 8 minutos de arco 5 minutos de arco 3 minutos de arco 2 12 minutos de arco 8 minutos de arco 5 minutos de arco 98ZDB 1 8 minutos de arco 5 minutos de arco 3 minutos de arco 2 12 minutos de arco 8 minutos de arco 5 minutos de arco 125ZDR 1 8 minutos de arco 5 minutos de arco 3 minutos de arco 2 12 minutos de arco 8 minutos de arco 5 minutos de arco ⑤ Tipo de eje de entrada
S: Bloqueo general (Omisión) (independientemente de si el motor con estrías puede usarlo. Pero el corte D no puede usarlo)
S1: Bloqueo con anillo de bloqueo (independientemente de si el motor con estrías puede usarlo. Pero el corte D no puede usarlo)
S2: Bloqueo con estría (eje de entrada con estría)
K: Con estría
A: Otro tipo (por favor contáctenos)➅ Potencia del motor servo aplicable (W) ⑦ Nombre del fabricante del motor servo (P33) ➇ Modelo del motor servo ■ Dibujo seccional
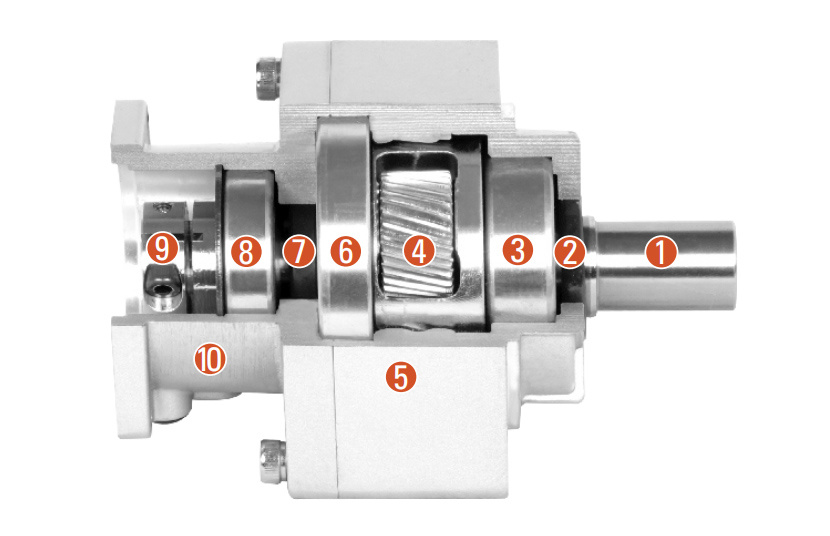
① Eje de salida
② Sello para el eje de salida
③ Rodamiento para el eje de salida
④ Engranaje planetario
⑤ Cubierta frontal
⑥ Rodamiento para el eje de salida
⑦ Sello para el eje de entrada
⑧ Rodamiento para el eje de entrada
⑨ Sistema de sujeción de precisión
➉ Cubierta traseraTABLA DE RENDIMIENTO ZDR (CUANDO LA VELOCIDAD DE ENTRADA ES 3000 RPM)
■Tabla de rendimiento
Reducción
RelaciónModo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
máx. Par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modelo Reducción
RelaciónMotor (rpm (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 1/3 52 ZDR 3 -50 1000 0.255 0.784 392 196 0.0575 3.43 10.3 52 ZDR 3 -100 1000 0.715 2.06 392 196 0.0575 3.43 10.3 52 ZDR 3 -200 1000 1.47 4.51 392 196 0.135 3.43 10.3 52 ZDR 3 -400 1000 3.43 10.3 392 196 0.145 3.43 10.3 78 ZDR 3 -750 1000 6.37 19.3 784 392 0.913 6.86 20.6 98 ZDR 3 -1000 1000 7.55 22.8 882 441 2.43 18.3 54.9 98 ZDR 3 -1500 1000 12.3 37.1 882 441 2.43 18.3 54.9 98 ZDR 3 -2000 1000 17.2 51.5 882 441 2.43 18.3 54.9 125 ZDR 3 -2500 1000 19.0 57.2 1370 686 5.55 44.1 132 125 ZDR 3 -3000 1000 23.7 71.2 1370 686 5.50 44.1 132 125 ZDR 3 -3500 1000 28.3 85.2 1370 686 5.50 44.1 132 125 ZDR 3 -4000 1000 33.1 99.0 1370 686 5.78 44.1 132 125 ZDR 3 -4500 1000 37.7 113 1370 686 5.78 44.1 132 125 ZDR 3 -5000 1000 42.9 128 1370 686 5.78 44.1 132 1/5 52 ZDR 5 -50 600 0.510 1.47 490 245 0.04 1.57 4.70 52 ZDR 5 -100 600 1.18 3.72 490 245 0.04 1.57 4.70 52 ZDR 5 -200 600 2.65 8.04 490 245 0.118 2.84 8.53 78 ZDR 5 -400 600 5.39 16.2 980 490 0.363 6.57 19.7 78 ZDR 5 -750 600 10.7 32.1 980 490 0.713 11.5 34.3 98 ZDR 5 -1000 600 13.4 40.5 1080 539 1.85 23.5 70.6 98 ZDR 5 -1500 600 21.5 64.4 1080 539 1.85 23.5 70.6 125 ZDR 5 -2000 600 23.8 71.5 1670 833 3.50 56.8 171 125 ZDR 5 -2500 600 31.8 95.5 1670 833 3.50 56.8 171 125 ZDR 5 -3000 600 39.6 119 1670 833 3.48 56.8 171 125 ZDR 5 -3500 600 47.2 141 1670 833 3.48 56.8 171 125 ZDR 5 -4000 600 55.3 166 1670 833 3.75 56.8 171 1/9 52 ZDR 9 -50 333 0.921 2.74 588 294 0.035 2.35 7.25 52 ZDR 9 -100 333 2.25 6.86 588 294 0.035 2.35 7.25 78 ZDR 9 -200 333 3.72 11.3 1180 588 0.275 9.70 29.2 78 ZDR 9 -400 333 9.51 28.5 1180 588 0.275 9.70 29.2 98 ZDR 9 -750 333 18.2 54.7 1470 735 0.650 18.2 54.7 125 ZDR 9 -1000 333 20.0 60.1 1960 980 2.81 73.5 221 125 ZDR 9 -1500 333 34.3 103 1960 980 2.81 73.5 221 125 ZDR 9 -2000 333 48.6 146 1960 980 2.81 73.5 221 125 ZDR 9 -2500 333 60.8 182 1960 980 2.81 73.5 221 125 ZDR 9 -3000 333 73.0 219 1960 980 2.77 73.5 221 Nota 1) El momento de conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota 2) La velocidad máxima de entrada es 5000 rpm. Generalmente se establece en 3000 rpm o menos.
Nota 3) La carga radial permisible se indica en el centro del eje de salida.
Nota 4) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.Reducción
RelaciónModo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
máx. Par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 1/15 52 ZDR 15 -50 200 1.67 5.00 784 392 0.035 4.02 12.2 52 ZDR 15 -100 200 3.72 11.4 784 392 0.035 4.02 12.2 78 ZDR 15 -200 200 6.27 18.8 1470 735 0.300 16.2 48.6 78 ZDR 15 -400 200 15.8 47.5 1470 735 0.300 16.2 48.6 98 ZDR 15 -750 200 30.4 91.2 1760 882 0.700 30.4 91.2 125 ZDR 15 -1000 200 33.3 100 2350 1180 2.80 91.4 274 125 ZDR 15 -1500 200 57.2 172 2350 1180 2.80 91.4 274 125 ZDR 15 -2000 200 81.0 243 2350 1180 2.80 91.4 274 1/20 52 ZDR 20 -50 150 2.21 6.63 804 402 0.034 5.00 15.0 52 ZDR 20 -100 150 5.00 15.0 804 402 0.034 5.00 15.0 78 ZDR 20 -200 150 8.69 26.1 1570 785 0.294 21.1 63.3 78 ZDR 20 -400 150 21.1 63.3 1570 785 0.294 21.1 63.3 98 ZDR 20 -750 150 40.6 122 1910 955 0.690 40.6 122 125 ZDR 20 -1000 150 44.5 134 2500 1250 2.72 78.4 235 1/25 52 ZDR 25 -50 120 2.74 8.33 882 441 0.0325 4.02 12.2 52 ZDR 25 -100 120 6.27 19.0 882 441 0.0325 6.27 19.0 78 ZDR 25 -200 120 11.1 33.3 1670 833 0.288 21.7 64.9 78 ZDR 25 -400 120 26.4 79.2 1670 833 0.288 26.4 79.2 98 ZDR 25 -750 120 50.7 152 2060 1030 0.680 50.7 152 125 ZDR 25 -1000 120 55.7 167 2650 1320 2.710 65.4 196 1/35 52 ZDR 35 -50 85 3.84 11.5 882 441 0.030 3.84 11.5 78 ZDR 35 -100 85 7.24 21.7 1670 833 0.065 13.9 41.7 78 ZDR 35 -200 85 15.5 46.6 1670 833 0.262 15.5 46.6 98 ZDR 35 -400 85 37.0 111 2060 1030 0.269 37.0 111 125 ZDR 35 -750 85 71.0 213 3430 1715 0.473 71.0 213 1/45 78 ZDR 45 -50 66 3.86 11.6 1670 833 0.0285 9.50 28.6 78 ZDR 45 -100 66 9.31 28.0 1670 833 0.0285 9.50 28.6 98 ZDR 45 -200 66 21.1 63.5 2060 1030 0.0256 28.3 85.2 125 ZDR 45 -400 66 47.5 142.5 3520 1760 0.245 57.0 171 125 ZDR 45 -750 66 91.3 274 3520 1760 1.770 91.3 274 1/81 78 ZDR 81 -50 37 7.02 20.8 1670 833 0.027 9.70 29.2 98 ZDR 81 -100 37 14.0 42.0 2060 1030 0.030 17.8 53.5 125 ZDR 81 -200 37 36.1 108.3 3530 1765 0.240 43.3 129.9 Nota 1) El momento de conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota 2) La velocidad máxima de entrada es 5000 rpm. Generalmente se establece en 3000 rpm o menos.
Nota 3) La carga radial permisible se indica en el centro del eje de salida.
Nota 4) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.TABLA DE RENDIMIENTO ZDR (CUANDO LA VELOCIDAD DE ENTRADA ES 2000 RPM)
■ Tabla de rendimiento
La misma especificación se aplica a todos los tipos estándar, P1 (bajo retroceso) y P2 (tipo de alta precisión).
Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modelo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m² (N.m) (N.m) 1/3 52 ZDR 3 -50 666 0.477 1.43 450 225 0.0575 3.43 10.3 52 ZDR 3 -100 666 1.05 3.15 450 225 0.135 3.43 10.3 52 ZDR 3 -200 666 2.48 7.45 450 225 0.145 3.43 10.3 78 ZDR 3 -400 666 5.01 15.0 900 450 0.913 6.86 20.6 98 ZDR 3 -750 666 8.73 26.2 1010 505 2.43 18.3 54.9 98 ZDR 3 -1000 666 12.3 37.1 1010 505 2.43 18.3 54.9 98 ZDR 3 -1500 666 18.3 54.9 1010 505 2.43 18.3 54.9 125 ZDR 3 -2000 666 23.7 71.2 1570 785 5.50 44.1 132 125 ZDR 3 -2500 666 30.8 92.5 1570 785 5.50 44.1 132 125 ZDR 3 -3000 666 37.7 113 1570 785 5.50 44.1 132 125 ZDR 3 -3500 666 44.1 132 1570 785 5.78 44.1 132 1/5 52 ZDR 5 -50 400 0.795 2.39 560 280 0.040 1.57 4.70 52 ZDR 5 -100 400 1.57 4.70 560 280 0.118 1.57 4.70 78 ZDR 5 -200 400 3.82 11.5 1120 560 0.363 6.57 19.7 78 ZDR 5 -400 400 8.35 25.1 1120 560 0.713 11.5 34.3 98 ZDR 5 -750 400 15.5 46.5 1230 615 1.85 23.5 70.6 98 ZDR 5 -1000 400 21.5 64.4 1230 615 1.85 23.5 70.6 125 ZDR 5 -1500 400 27.8 83.5 1900 950 3.50 56.8 171 125 ZDR 5 -2000 400 39.6 119 1900 950 3.48 56.8 171 125 ZDR 5 -2500 400 51.4 154 1900 950 3.75 56.8 171 1/9 52 ZDR 9 -50 222 1.57 4.72 670 335 0.035 2.35 7.25 78 ZDR 9 -100 222 2.35 7.04 1340 670 0.275 9.70 29.2 78 ZDR 9 -200 222 6.64 19.9 1340 670 0.275 9.70 29.2 98 ZDR 9 -400 222 14.0 41.9 1680 840 0.650 18.2 54.7 125 ZDR 9 -750 222 23.6 70.9 2240 1120 2.81 73.5 221 125 ZDR 9 -1000 222 34.3 103 2240 1120 2.81 73.5 221 125 ZDR 9 -1500 222 53.7 161 2240 1120 2.81 73.5 221 125 ZDR 9 -2000 222 73.0 219 2240 1120 2.77 73.5 221 1/15 52 ZDR 15 -50 133 2.62 7.87 882 441 0.035 4.02 12.2 78 ZDR 15 -100 133 3.91 11.7 1670 833 0.300 16.2 48.6 78 ZDR 15 -200 133 11.1 33.2 1670 833 0.300 16.2 48.6 98 ZDR 15 -400 133 23.3 69.8 2020 1010 0.700 30.4 91.2 125 ZDR 15 -750 133 39.4 118 2650 1320 2.80 91.4 274 125 ZDR 15 -1000 133 57.2 172 2650 1320 2.80 91.4 274 125 ZDR 15 -1500 133 91.3 274 2650 1320 2.80 91.4 274 1/20 52 ZDR 20 -50 100 3.50 10.5 910 455 0.034 5.00 15.0 78 ZDR 20 -100 100 5.73 17.2 1790 895 0.294 21.1 63.3 78 ZDR 20 -200 100 14.8 44.4 1790 895 0.294 21.1 63.3 98 ZDR 20 -400 100 31.0 93.1 2180 1090 0.294 40.6 122 1/25 52
78ZDR 25 -50 80.0 4.37 13.1 882 441 0.0325 6.27 19.0 ZDR 25 -100 80.0 7.16 21.5 1670 833 0.288 21.7 64.9 78 ZDR 25 -200 80.0 18.5 55.4 1670 833 0.288 21.7 64.9 98 ZDR 25 -400 80.0 38.8 116 2060 1030 0.680 50.7 152 125 ZDR 25 -750 80.0 65.4 196 2650 1320 1.88 65.4 196 1/35 78 ZDR 35 -50 57.0 4.43 13.3 1900 950 0.262 15.5 46.6 78 ZDR 35 -100 57.0 12.7 38.1 1900 950 0.262 15.5 46.6 98 ZDR 35 -200 57.0 22.0 66.0 2340 1170 0.269 37.0 111 1/45 78 ZDR 45 -50 44.4 5.80 17.4 1670 833 0.0285 9.50 28.6 98 ZDR 45 -100 44.4 14.0 42.1 2060 1030 0.0285 28.3 85.2 98 ZDR 45 -200 44.4 28.3 85.2 2060 1030 0.0285 28.3 85.2 1/81 78 ZDR 81 -50 24.6 9.70 29.2 1670 833 0.0270 9.70 29.2 98 ZDR 81 -100 24.6 17.8 53.5 2060 1030 0.0300 17.8 53.5 Nota 1) El momento de conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota2) La carga radial permisible se indica en el centro del eje de salida.
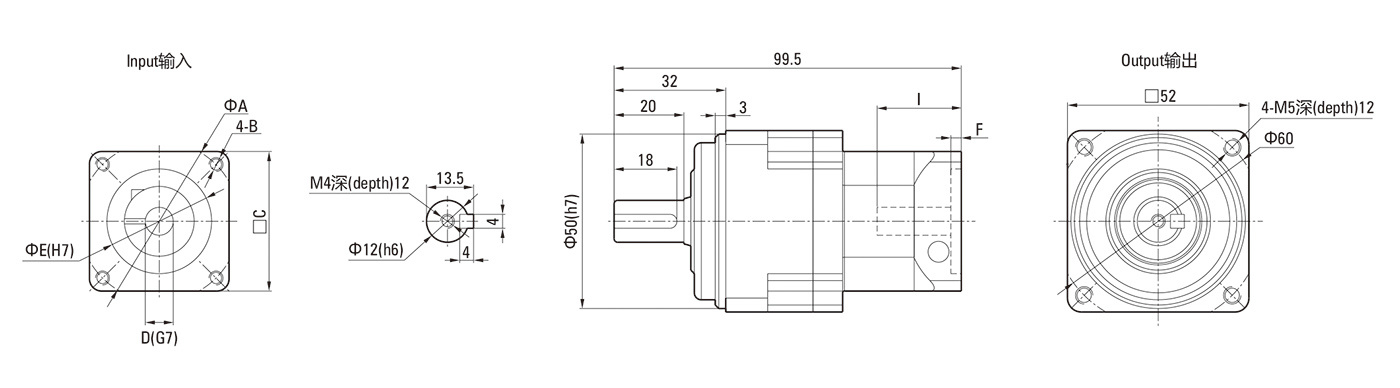
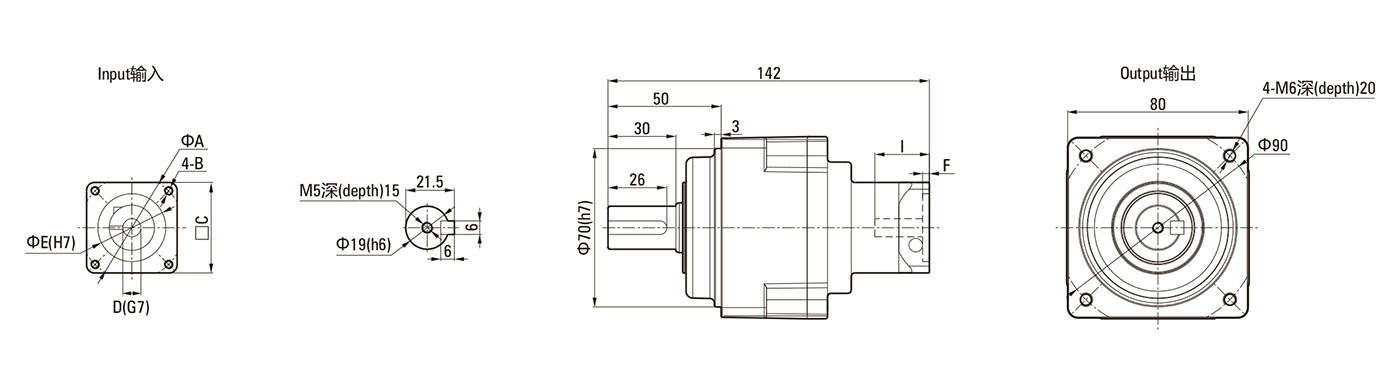
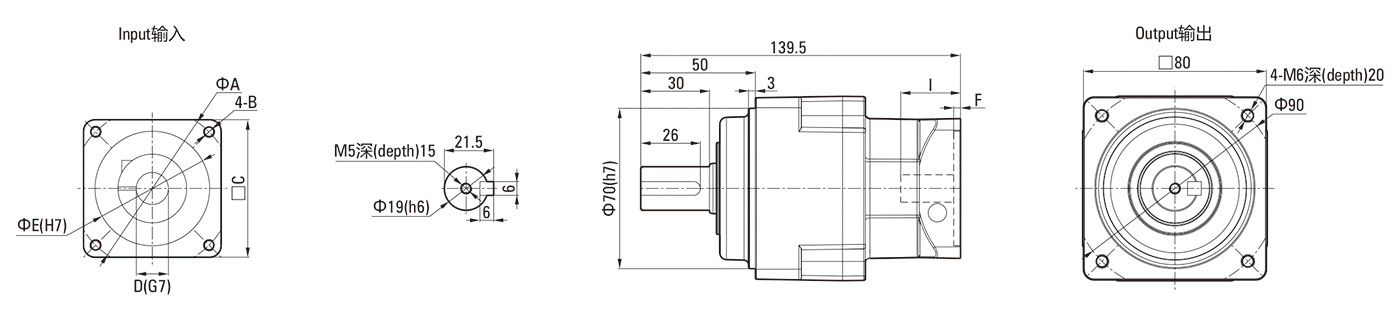
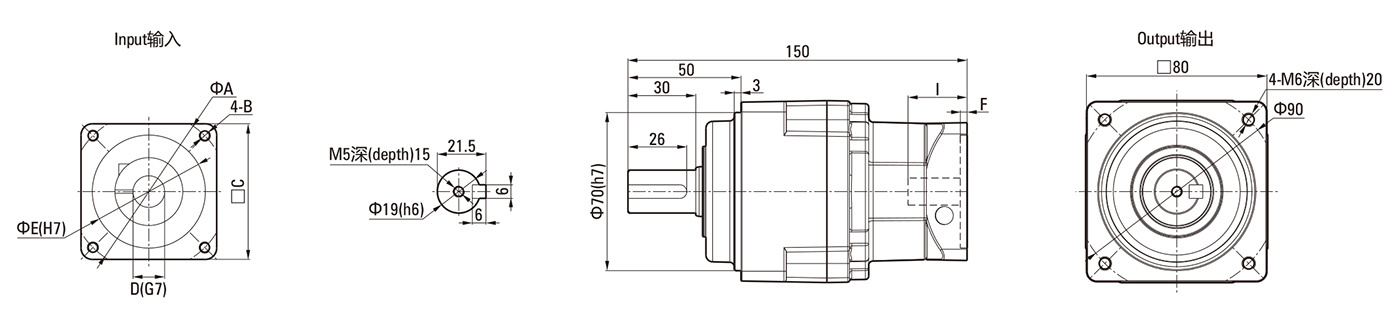
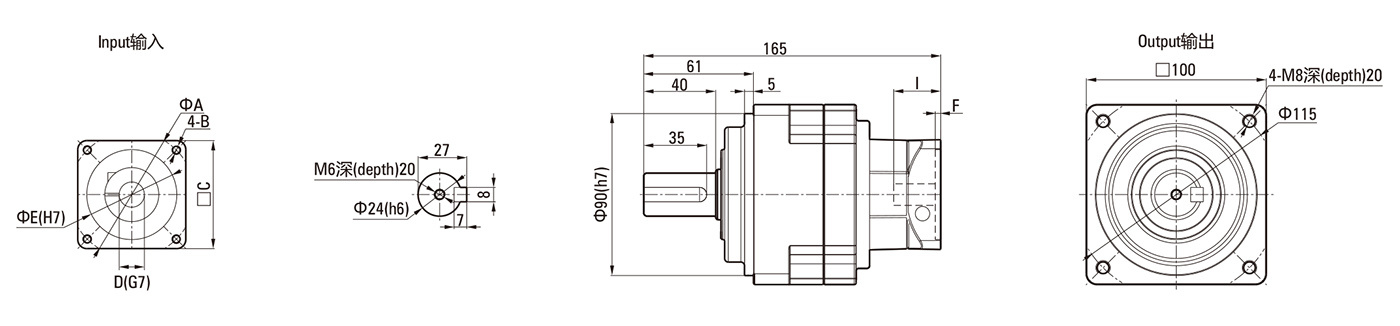
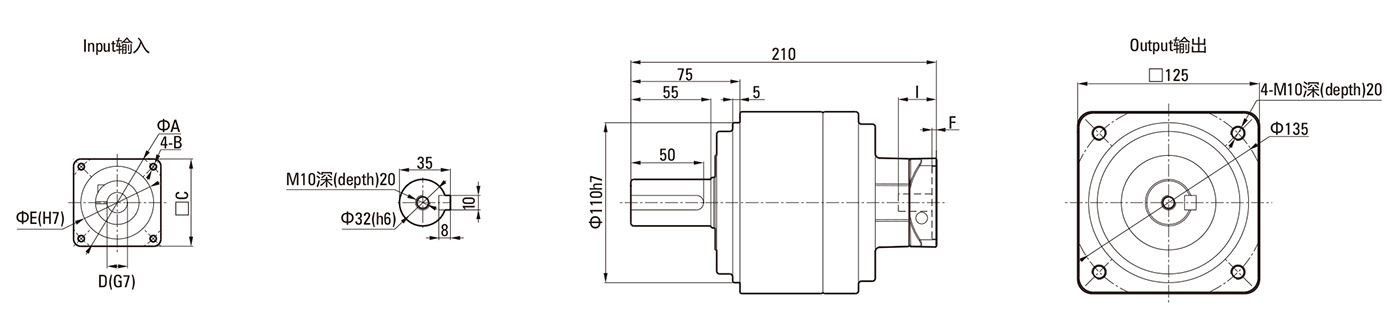
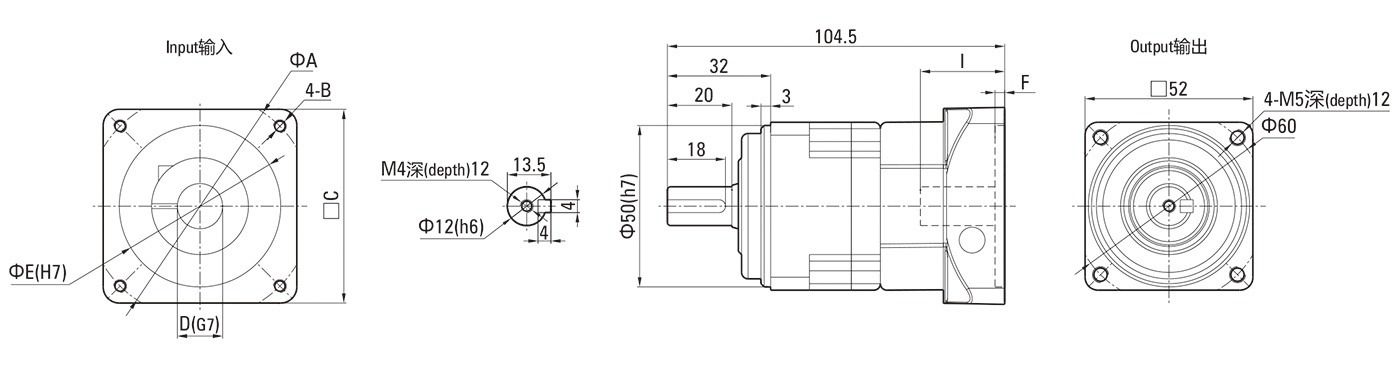
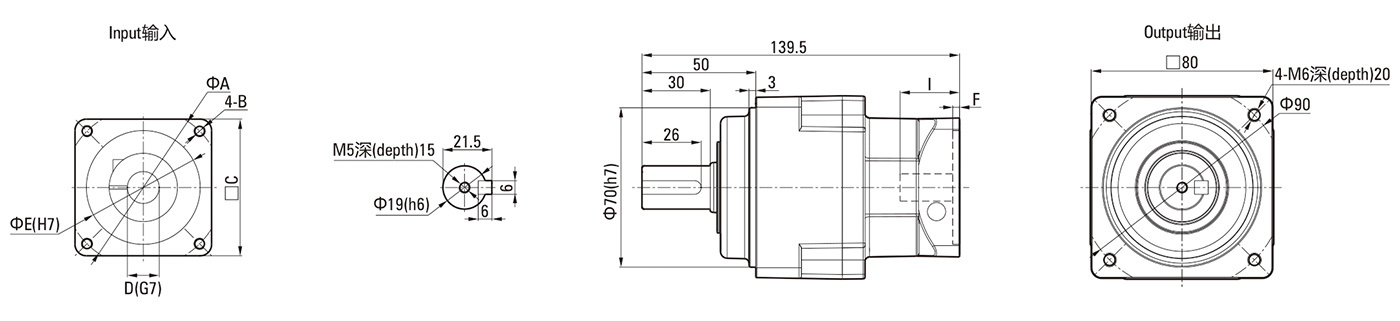
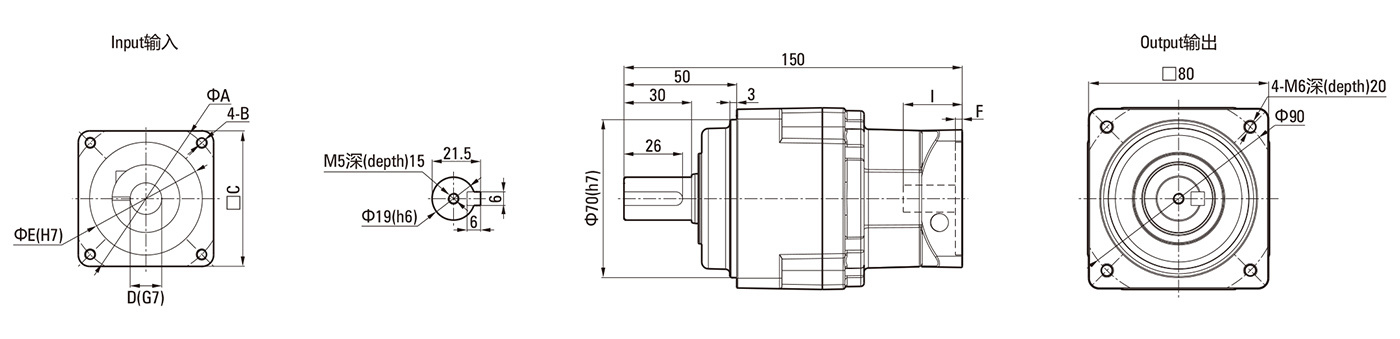
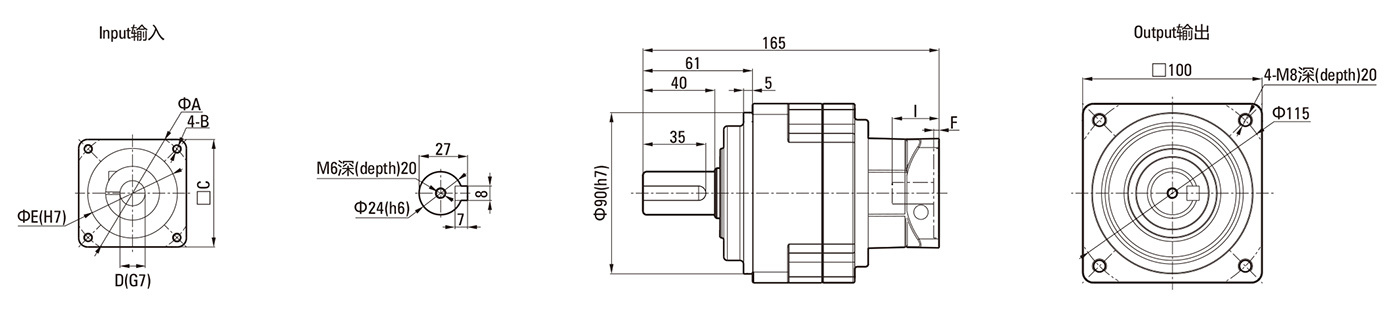
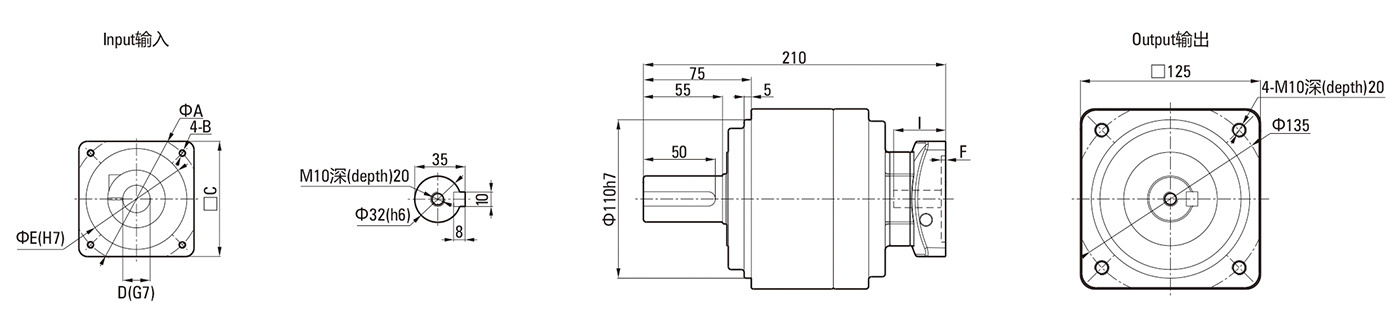
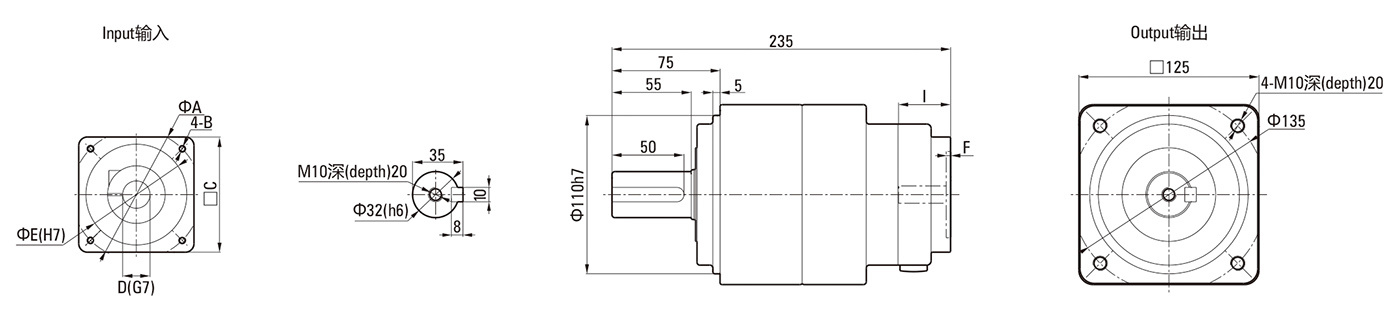
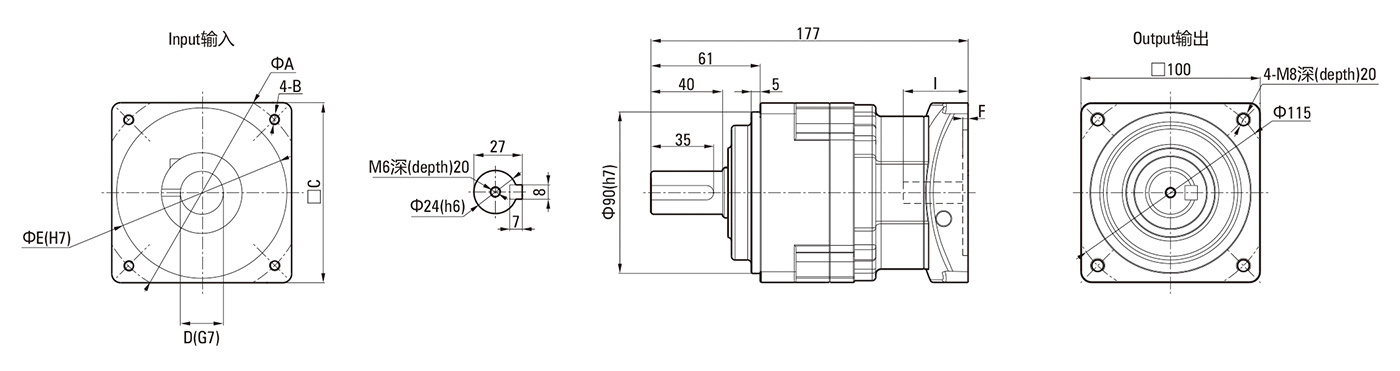
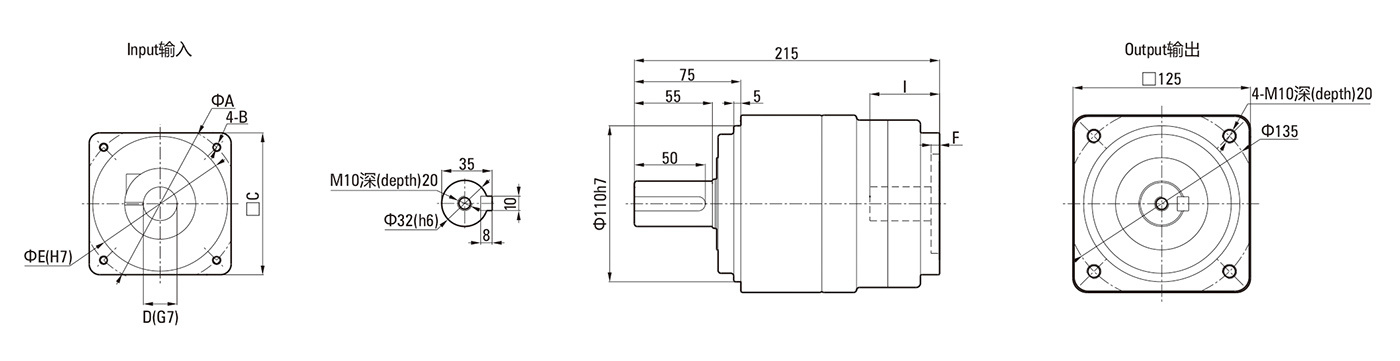
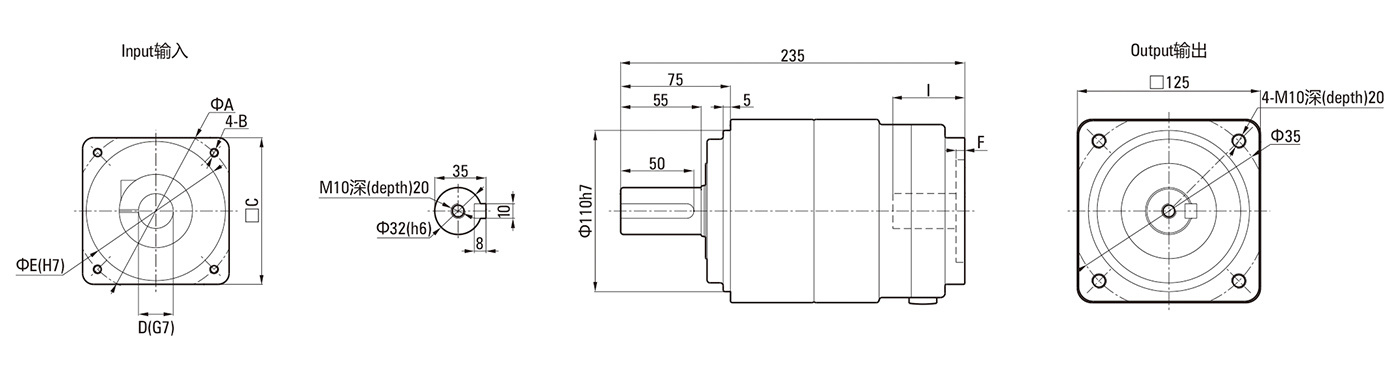
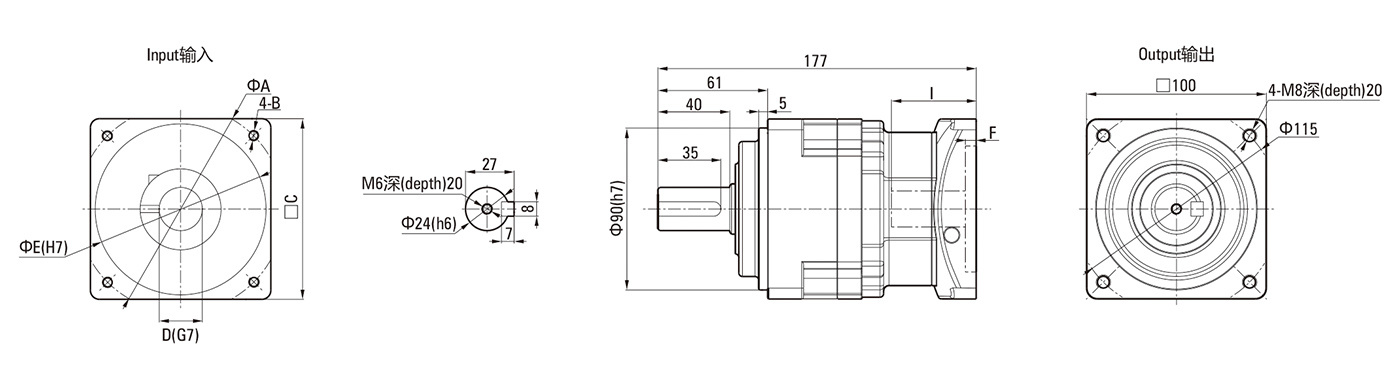
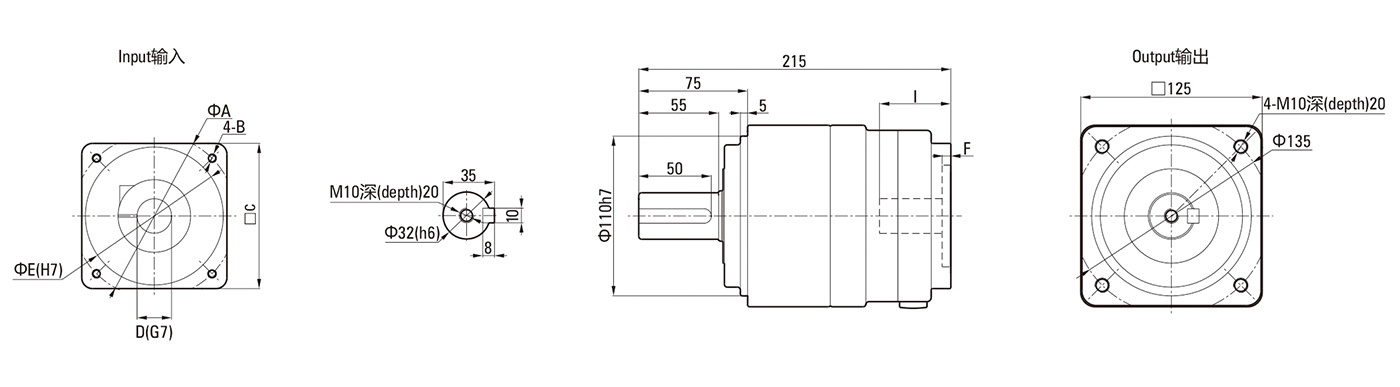
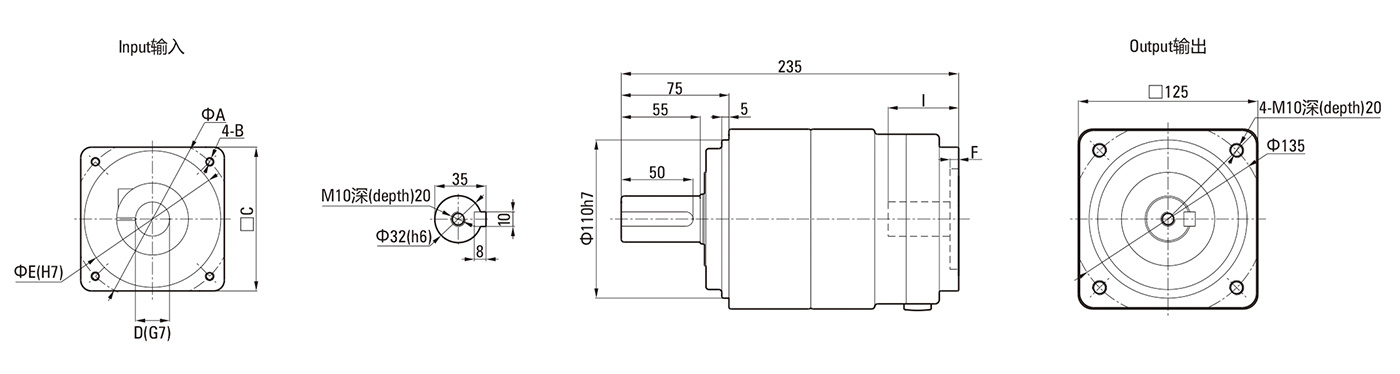
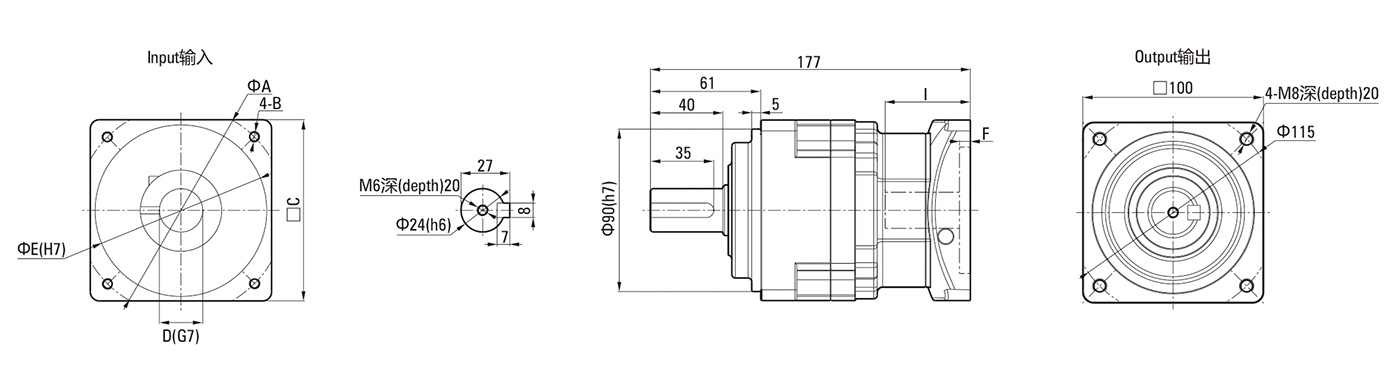
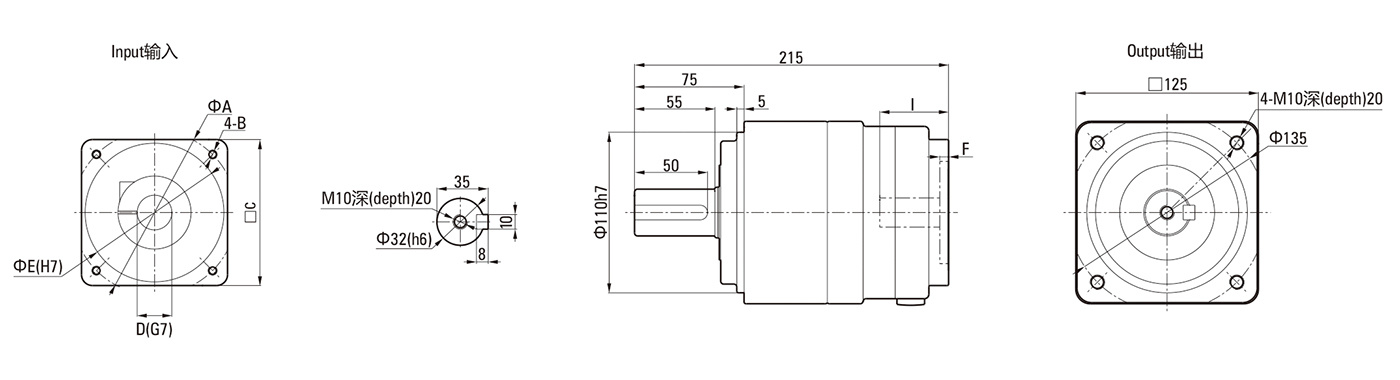
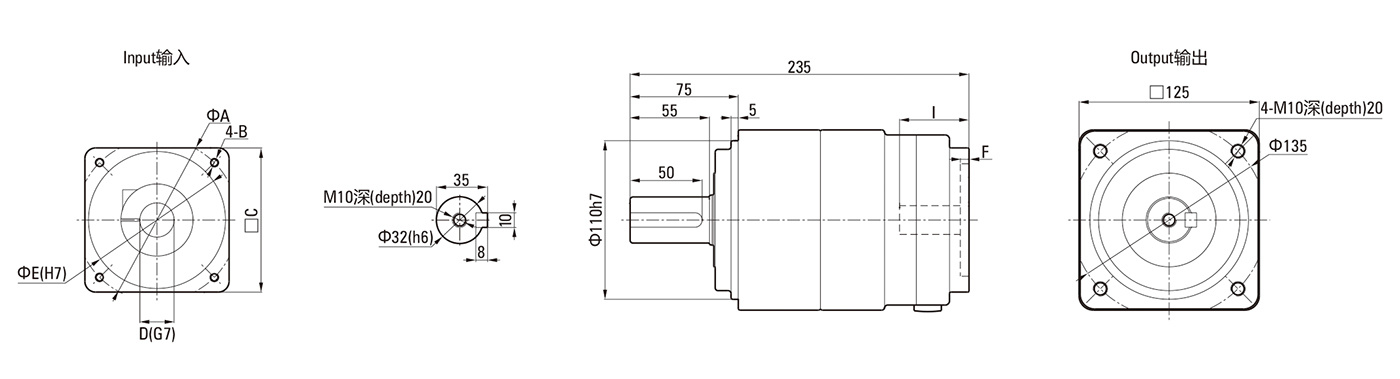
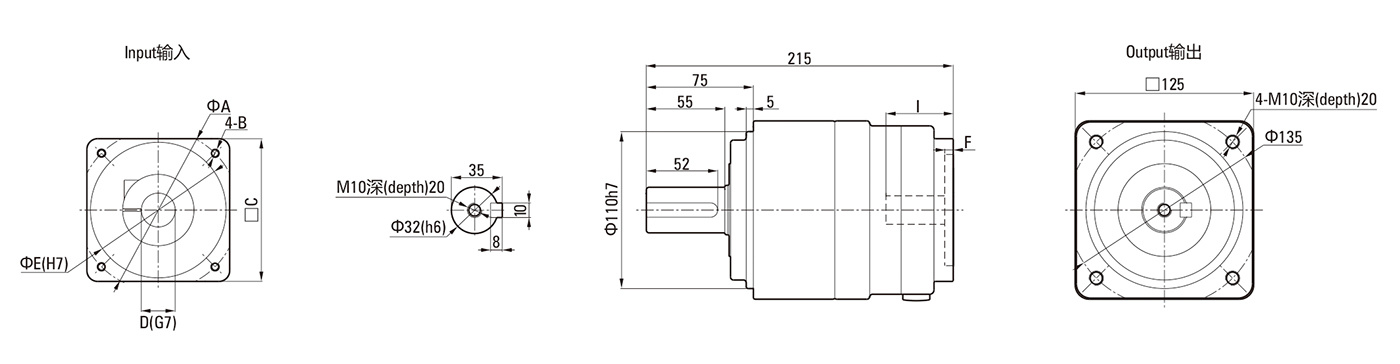
Nota3) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.■ Dimensiones

■ Tabla dimensional
Tipo Longitud total L Eje de salida Brida Número de tipo Modelo Reducción
RelaciónMotor Fabricado por Panasonic
MSMA
Yaskawa-made
SGMASH
SGMSHMitsubishi-made
HC-KFS
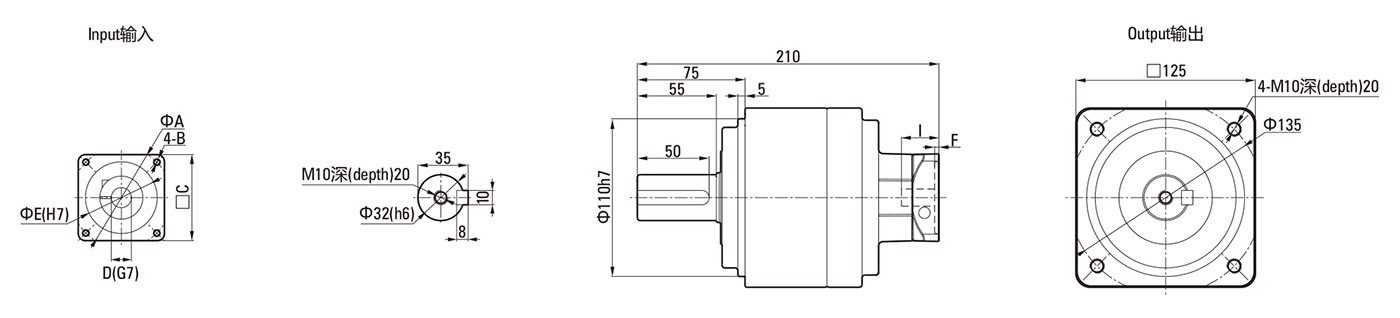
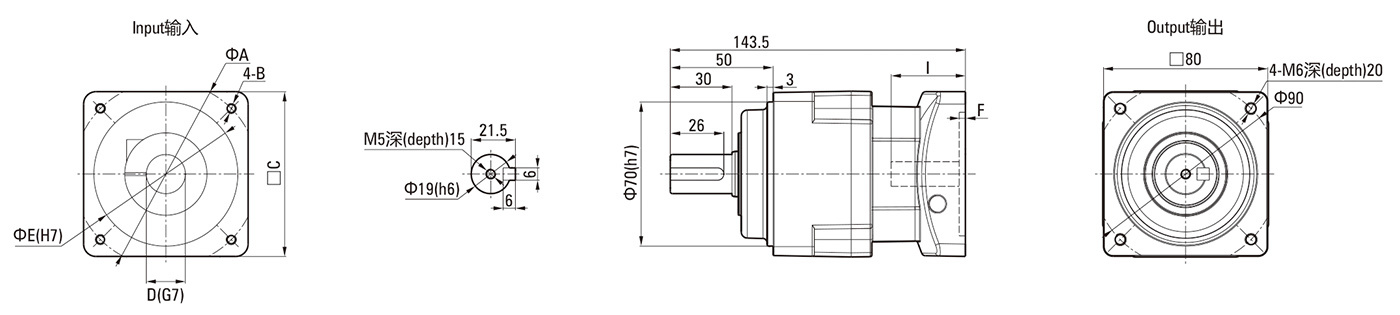
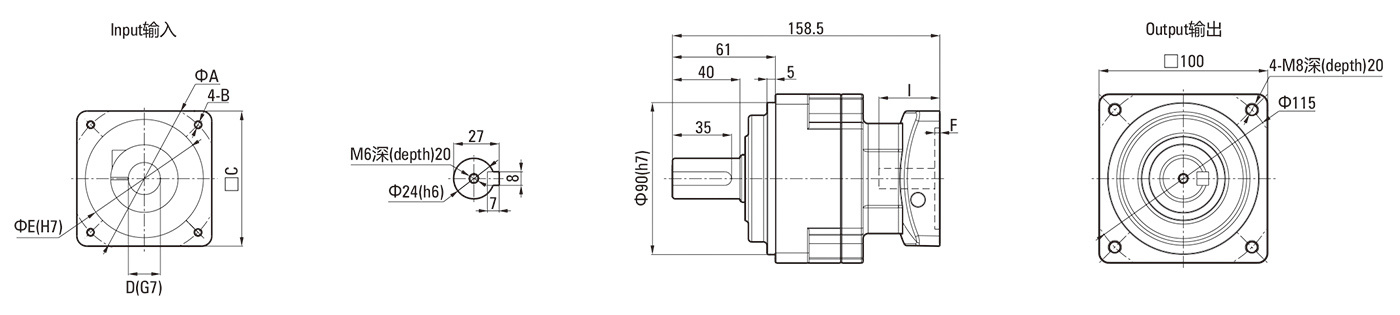
HC-RFSLR S 0 0M G W×U T D LB LE LA LZ X 52 ZDR 3·5·9 50 99.5 32 12 20 18 M4(profundidad)12 4×13.5 4 52 50 3 60 M5 12 52 ZDR 15·20·25·35 50 110 52 ZDR 3·5·9 100 99.5 52 ZDR 15·20·25 100 110 52 ZDR 3·5 200 104.5 52 ZDR 3 400 78 ZDR 45·81 50 142 50 19 30 26 M5(profundidad)15 6×21.5 6 80 70 3 90 M6 20 78 ZDR 35 100 150 78 ZDR 45 100 142 78 ZDR 9 200 139.5 78 ZDR 15·20·25·35 200 150 78 ZDR 5·9 400 139.5 78 ZDR 15·20·25 400 150 78 ZDR 3·5 750 143.5 98 ZDR 81 100 158 61 24 40 35 M6(profundidad)20 8×27 7 100 90 5 115 M8 20 98 ZDR 45 200 165 98 ZDR 35 400 98 ZDR 9 750 158.5 98 ZDR 15·20·25 750 171 98 ZDR 3.5 1000 177 98 ZDR 3.5 1500 98 ZDR 3 2000 125 ZDR 81 200 210 75 32 55 52 M10(profundidad)20 10×35 8 125 110 5 135 M10 20 125 ZDR 45 400 125 ZDR 35 750 125 ZDR 45 750 235 125 ZDR 9 1000 215 125 ZDR 15·25 1000 235 125 ZDR 9 1500 215 125 ZDR 15 1500 235 125 ZDR 5·9 2000 215 125 ZDR 15 2000 235 125 ZDR 3·5·9 2500 215 - - 125 ZDR 3·5·9 3000 215 225 - 125 ZDR 3.5 3500 215 - 225 125 ZDR 3.5 4000 225 225 - 125 ZDR 3 4500 225 - - 125 ZDR 3 5000 225 Nota1) Por favor, consulte con nosotros si el modelo de motor no es estándar (lista de motores compatibles). (La dimensión de la brida puede ser diferente si la ascensión del motor es diferente.)
Nota2) La rotación del eje de salida es en la misma dirección que la entrada del motor.
Nota3) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.DIBUJO DIMENSIONAL Y TABLA DE RENDIMIENTO DE 50W
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modelo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 50W 1/3 52 ZDR 3 50 1000 0.255 0.784 392 196 0.0575 3.43 10.3 1/5 52 ZDR 5 50 600 0.510 1.47 490 245 0.0400 1.57 4.70 1/9 0
02ZDR 9 50 333 0.921 2.74 588 294 0.0350 2.35 7.25 1/15 52 ZDR 15 50 200 1.67 5.00 784 392 0.0350 4.02 12.2 1/20 52 ZDR 20 50 150 2.21 6.63 804 402 0.0340 5.00 15.0 1/25 52 ZDR 25 50 120 2.74 8.33 882 441 0.0325 4.02 12.2 1/35 52 ZDR 35 50 85 3.84 11.5 882 441 0.0300 3.84 11.5 1/45 78 ZDR 45 50 66 3.86 11.6 1670 833 0.0285 9.50 28.6 1/81 78 ZDR 81 50 37 7.02 20.8 1670 833 0.0270 9.70 29.2 Nota1) En caso de acoplar a un motor más allá de los modelos estándar (serie de motores compatibles),
contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
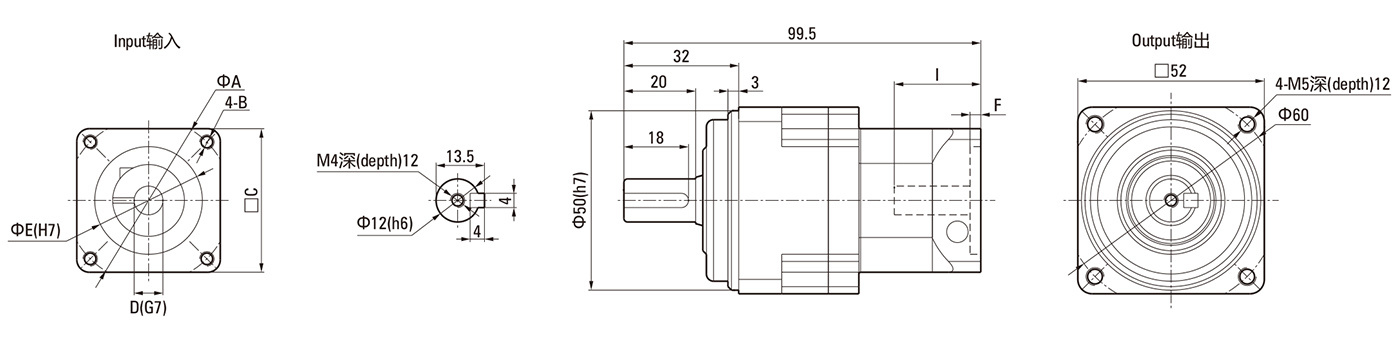
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
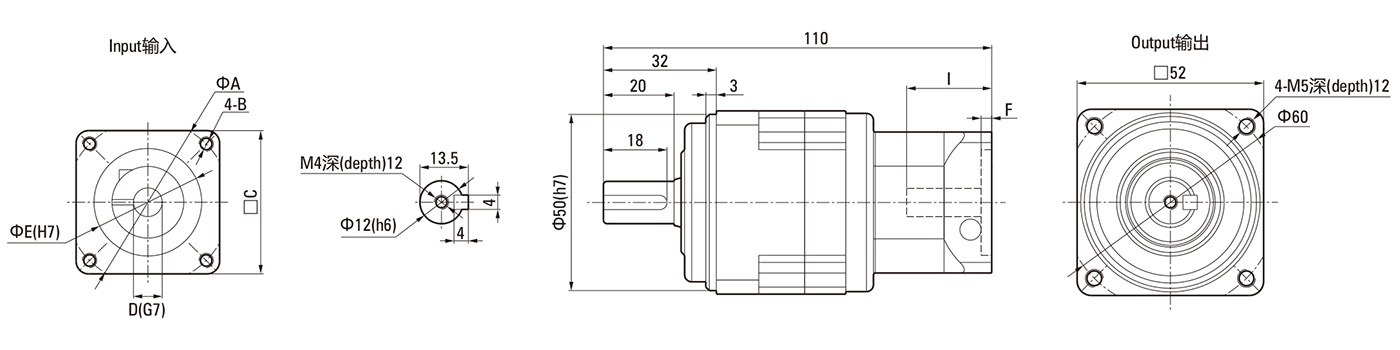
● 52ZDR3·5·9-50
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 45 M3(profundidad)6.5 40 8 30 4 26 T2 46 M4(profundidad)6.5 40 6 30 4 26 T3 46 M4(profundidad)6.5 40 8 30 4 26 · Peso bruto 0.55kg
· Para detalles de T1~3, consulte la página 33■ Dimensiones
● 52ZDR15·20·25·35-50

● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 45 M3(profundidad)6.5 40 8 30 4 26 T2 46 M4(profundidad)6.5 40 6 30 4 26 T3 46 M4(profundidad)6.5 40 8 30 4 26 · Peso bruto 0.7kg
· Para detalles de T1~3, consulte la página 33■ Dimensiones
● 78ZDR45·81-50
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 45 M3(profundidad)6.5 40 8 30 4 26 T2 46 M4(profundidad)6.5 40 6 30 4 26 T3 46 M4(profundidad)6.5 40 8 30 4 26 · Peso bruto 1.7kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL Y TABLA DE RENDIMIENTO DE 100W
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Entrada nominal
MotorReducción
RelaciónModo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modelo Reducción
RelaciónMotor (rpm (N.m) (N.m) (N) (N) (x10-4kg.m2) (N.m) (N.m) 100W 1/3 52 ZDR 3 100 1000 0.715 2.06 392 196 0.0575 3.43 10.3 1/5 52 ZDR 5 100 600 1.18 3.72 490 245 0.0400 1.57 4.70 1/9 52 ZDR 9 100 333 2.25 6.86 588 294 0.0350 2.35 7.25 1/15 52 ZDR 15 100 200 3.72 11.4 784 392 0.0350 4.02 12.2 1/20 52 ZDR 20 100 150 5.00 15.0 804 402 0.0340 5.00 15.0 1/25 52 ZDR 25 100 120 6.27 19.0 882 441 0.0325 6.27 19.0 1/35 78 ZDR 35 100 85 7.24 21.7 1670 833 0.0650 13.9 41.7 1/45 78 ZDR 45 100 66 9.31 28.0 1670 833 0.0285 9.50 28.6 1/81 98 ZDR 81 100 37 14.0 42.0 2060 1030 0.0300 17.8 53.5 Nota1) En caso de acoplar a un motor más allá de los modelos estándar (serie de motores compatibles),
contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 52ZDR3·5·9-100
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 45 M3(profundidad)6.5 40 8 30 4 26 T2 46 M4(profundidad)6.5 40 8 30 4 26 T3 46 M4(profundidad)6.5 40 8 30 4 26 · Peso bruto 0.55kg
· Para detalles de T1~3, consulte la página 33● 52ZDR15·20·25-100
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 45 M3(profundidad)6.5 40 8 30 4 26 T2 46 M4(profundidad)6.5 40 8 30 4 26 T3 46 M4(profundidad)6.5 40 8 30 4 26 · Peso bruto 0.7kg
· Para detalles de T1~3, consulte la página 33● 78ZDR35-100
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 45 M3(profundidad)6.5 40 8 30 4 26 T2 46 M4(profundidad)6.5 40 8 30 4 26 T3 46 M4(profundidad)6.5 40 8 30 4 26 · Peso bruto 2.0kg
· Para detalles de T1~3, consulte la página 33● 98ZDR81-100
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 45 M3(profundidad)6.5 40 8 30 4 26 T2 46 M4(profundidad)6.5 40 8 30 4 26 T3 46 M4(profundidad)6.5 40 8 30 4 26 · Peso bruto 3.0kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL Y TABLA DE RENDIMIENTO DE 200W
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modelo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m2) (N.m) (N.m) 200W 1/3 52 ZDR 3 200 1000 1.47 4.51 392 196 0.135 3.43 10.3 1/5 52 ZDR 5 200 600 2.65 8.04 490 245 0.118 2.84 8.53 1/9 78 ZDR 9 200 333 3.72 11.3 1180 588 0.275 9.70 29.2 1/15 78 ZDR 15 200 200 6.27 18.8 1470 735 0.300 16.2 48.6 1/20 78 ZDR 20 200 150 8.69 26.1 1570 785 0.294 21.1 63.3 1/25 78 ZDR 25 200 120 11.1 33.3 1670 833 0.288 21.7 64.9 1/35 78 ZDR 35 200 85 15.5 46.6 1670 833 0.262 15.5 46.6 1/45 98 ZDR 45 200 66 21.1 63.5 2060 1030 0.0256 28.3 85.2 1/81 125 ZDR 81 200 37 36.1 108.3 3530 1765 0.240 43.3 129.9 Nota1) En caso de acoplar a un motor más allá de los modelos estándar (serie de motores compatibles),
contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 52ZDR3·5-200
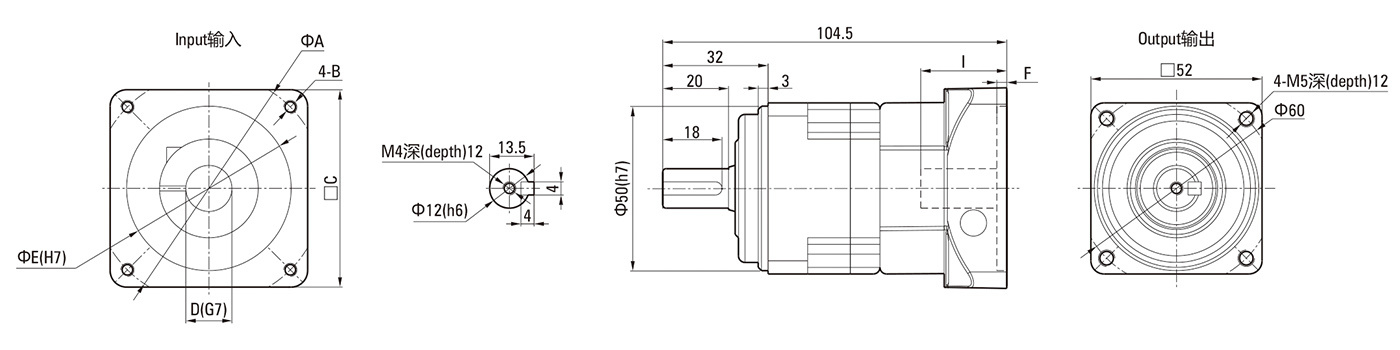
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 11 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 0.72kg
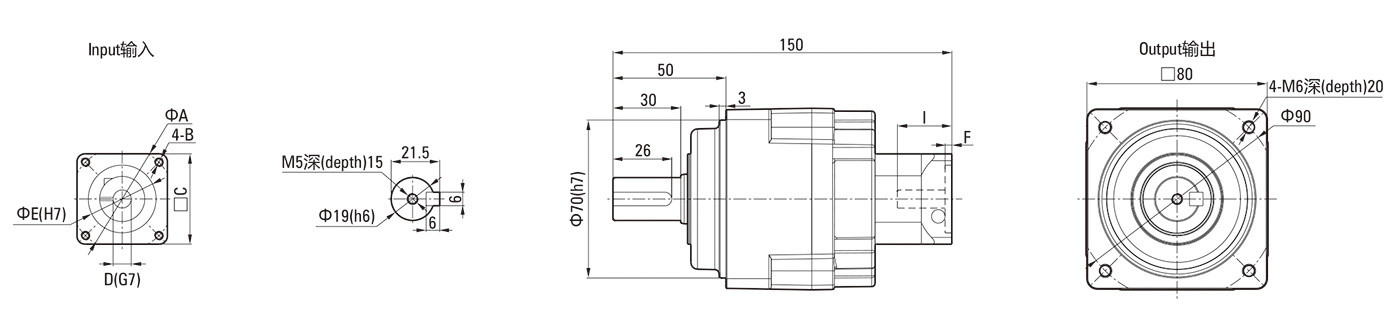
· Para detalles de T1~3, consulte la página 33● 78ZDR9-200
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 11 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 1.7kg
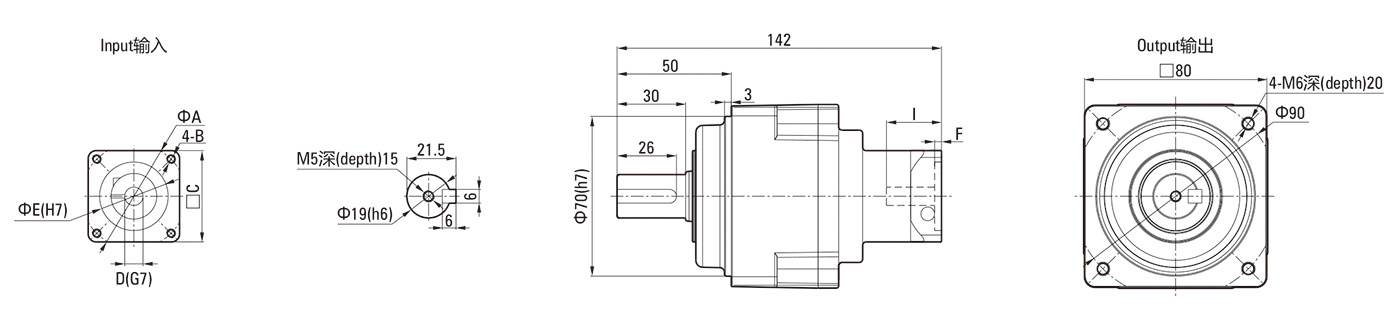
· Para detalles de T1~3, consulte la página 33● 78ZDR15·20·25·35-200
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 11 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 2.1kg
· Para detalles de T1~3, consulte la página 33● 98ZDR45-200
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 11 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 3.2kg
· Para detalles de T1~3, consulte la página 33● 125ZDR81-200
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 11 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 3.0kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 400W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modelo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 400W 1/3 52 ZDR 3 400 1000 3.43 10.3 392 196 0.145 3.43 10.3 1/5 78 ZDR 5 400 600 5.39 16.2 980 490 0.363 6.57 19.7 1/9 78 ZDR 9 400 333 9.51 28.5 1180 588 0.275 9.70 29.2 1/15 78 ZDR 15 400 200 15.8 47.5 1470 735 0.300 16.2 48.6 1/20 78 ZDR 20 400 150 21.1 63.3 1570 785 0.294 21.1 63.3 1/25 78 ZDR 25 400 120 26.4 79.2 1670 833 0.288 26.4 79.2 1/35 98 ZDR 35 400 85 37.0 111 2060 1030 0.269 37.0 111 1/45 125 ZDR 45 400 66 47.5 142.5 3520 1760 0.245 57 171 Nota1) En caso de acoplar a un motor más allá de los modelos estándar (serie de motores compatibles),
contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 52ZDR3-400
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 14 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 0.71kg
· Para detalles de T1~3, consulte la página 33● 78ZDR5·9-400
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 14 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 1.7kg
· Para detalles de T1~3, consulte la página 33● 78ZDR15·20·25-400
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 14 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 2.1kg
· Para detalles de T1~3, consulte la página 33● 98ZDR35-400
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 14 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 3.2kg
· Para detalles de T1~3, consulte la página 33● 125ZDR45-400
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 70 M4(profundidad)10 60 14 50 4 30 T2 70 M5(profundidad)10 60 14 50 4 30 T3 70 M5(profundidad)10 60 14 50 4 30 · Peso bruto 7.2kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 750W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10⁴kg.m²) (N.m) (N.m) 750W 1/3 78 ZDR 3 750 1000 6.37 19.3 784 392 0.913 6.86 20.6 1/5 78 ZDR 5 750 600 10.7 32.1 980 490 0.713 11.5 34.3 1/9 98 ZDR 9 750 333 18.2 54.7 1470 735 0.650 18.2 54.7 1/15 98 ZDR 15 750 200 30.4 91.2 1760 882 0.700 30.4 91.2 1/20 98 ZDR 20 750 150 40.6 122 1910 955 0.690 40.6 122 1/25 98 ZDR 25 750 120 50.7 152 2060 1030 0.680 50.7 152 1/35 125 ZDR 35 750 85 71.0 213 3430 1715 0.473 71.0 213 1/45 125 ZDR 45 750 66 91.3 274 3520 1760 1.77 91.3 274 Nota1) En caso de acoplar a un motor más allá de los modelos estándar (serie de motores compatibles),
contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 78ZDR3·5-750
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 90 M5(profundidad)10 80 19 70 4 40 T2 90 M6(profundidad)10 80 16 70 4 40 T3 90 M6(profundidad)10 80 19 70 4 40 · Peso bruto 2.1kg
· Para detalles de T1~3, consulte la página 33● 98ZDR9-750
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 90 M5(profundidad)10 80 19 70 4 40 T2 90 M6(profundidad)10 80 16 70 4 40 T3 90 M6(profundidad)10 80 19 70 4 40 · Peso bruto 3.4kg
· Para detalles de T1~3, consulte la página 33● 98ZDR15·20·25-750
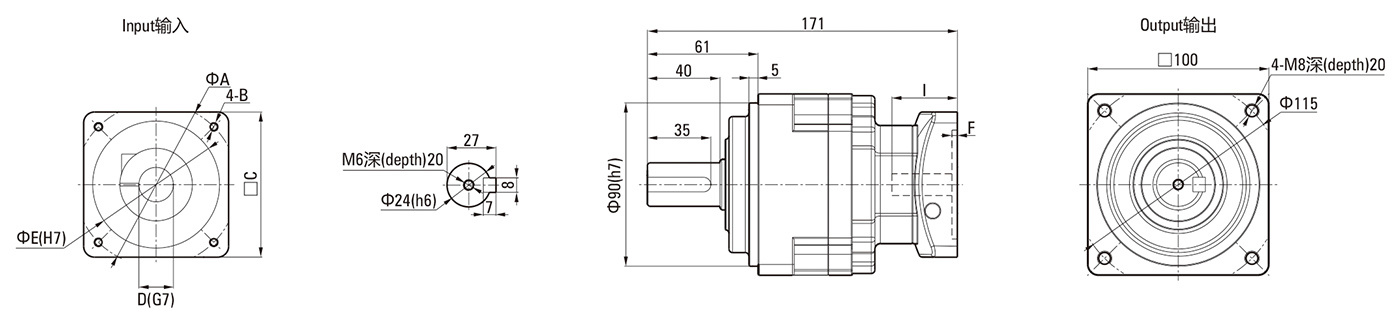
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 90 M5(profundidad)10 80 19 70 4 40 T2 90 M6(profundidad)10 80 16 70 4 40 T3 90 M6(profundidad)10 80 19 70 4 40 · Peso bruto 3.8kg
· Para detalles de T1~3, consulte la página 33● 125ZDR35-750
● Tabla de dimensiones de brida detallada (Unidad:mm)
TipoDeMotor A B C D E F I T1 90 M5(profundidad)10 80 19 70 4 40 T2 90 M6(profundidad)10 80 16 70 4 40 T3 90 M6(profundidad)10 80 19 70 4 40 · Peso bruto 7.2kg
· Para detalles de T1~3, consulte la página 33● 125ZDR45-750
● Tabla de dimensiones de brida detallada (Unidad:mm)
TipoDeMotor A B C D E F I T1 90 M5(profundidad)10 80 19 70 4 40 T2 90 M6(profundidad)10 80 16 70 4 40 T3 90 M6(profundidad)10 80 19 70 4 40 · Peso bruto 12.0kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 1000W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 1000W 1/3 98 ZDR 3 1000 1000 7.55 22.8 882 441 2.43 18.3 54.9 1/5 98 ZDR 5 1000 600 13.4 40.5 1080 539 1.85 23.5 70.6 1/9 125 ZDR 9 1000 333 20.2 60.1 1960 980 2.81 73.5 221 1/15 125 ZDR 15 1000 200 33.3 100 2350 1180 2.80 91.4 274 1/20 125 ZDR 20 1000 150 44.5 134 2500 1250 2.72 78.4 235 1/25 125 ZDR 25 1000 120 55.7 167 2650 1320 2.71 65.4 196 Nota1) En caso de acoplar a un motor más allá de los modelos estándar (serie de motores compatibles),
contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 98ZDR3·5-1000
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 100 M6(profundidad)15 90 19 80 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55 · Peso bruto 3.9kg
· Para detalles de T1~3, consulte la página 33● 125ZDR9-1000
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 100 M6(profundidad)15 90 19 80 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55 · Peso bruto 11.0kg
· Para detalles de T1~3, consulte la página 33● 125ZDR15·25-1000
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 100 M6(profundidad)15 90 19 80 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55 · Peso bruto 12.0kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 1500W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 1500W 1/3 98 ZDR 3 1500 1000 12.3 37.1 882 441 2.43 18.3 54.9 1/5 98 ZDR 5 1500 600 21.5 64.4 1080 539 1.85 23.5 70.6 1/9 125 ZDR 9 1500 333 34.3 103 1960 980 2.81 73.5 221 1/15 125 ZDR 15 1500 200 57.2 172 2350 1180 2.80 91.4 274 Nota1) En caso de acoplar a un motor más allá de los modelos estándar (serie de motores compatibles),
contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 98ZDR3·5-1500
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 115 M8(profundidad)15 100 19 95 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55 · Peso bruto 3.9kg
· Para detalles de T1~3, consulte la página 33■ Dimensiones
● 125ZDR9-1500
● Tabla de dimensiones de brida detallada (Unidad:mm)
TipoDeMotor A B C D E F I T1 115 M8(profundidad)15 100 19 95 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55 · Peso bruto 11.5kg
· Para detalles de T1~3, consulte la página 33● 125ZDR15-1500
● Tabla de dimensiones de brida detallada (Unidad:mm)
· Peso bruto 12.5kg
Tipo de motor A B C D E F I T1 115 M8(profundidad)15 100 19 95 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 2000W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 2000W 1/3 98 ZDR 3 2000 1000 17.2 51.5 882 441 2.43 18.3 54.9 1/5 125 ZDR 5 2000 600 23.8 71.5 1670 833 3.50 56.8 171 1/9 125 ZDR 9 2000 333 48.6 146 1960 980 2.81 73.5 221 1/15 125 ZDR 15 2000 200 81.0 243 2350 1180 2.80 91.4 274 Nota1) En caso de acoplar a un motor más allá de los modelos estándar (serie de motores compatibles),
contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 98ZDR3-2000
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 115 M8(profundidad)15 100 19 95 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55 · Peso bruto 3.9kg
· Para detalles de T1~3, consulte la página 33■ Dimensiones
● 125ZDR5·9-2000
● Tabla de dimensiones de brida detallada (Unidad:mm)
TipoDeMotor A B C D E F I T1 115 M8(profundidad)15 100 19 95 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55 · Peso bruto 11.5kg
· Para detalles de T1~3, consulte la página 33● 125ZDR15-2000
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 115 M8(profundidad)15 100 19 95 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 115 M8(profundidad)15 100 24 95 4 55 · Peso bruto 12.5kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 2500W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 2500W 1/3 125 ZDR 3 2500 1000 19.0 57.2 1370 686 5.55 44.1 132 1/5 125 ZDR 5 2500 600 31.8 95.5 1670 833 3.50 56.8 171 1/9 125 ZDR 9 2500 333 60.8 182 1960 980 2.81 73.5 221 Nota1) En caso de adjuntar a un motor más allá de los modelos estándar (serie de coincidencia de motores), contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
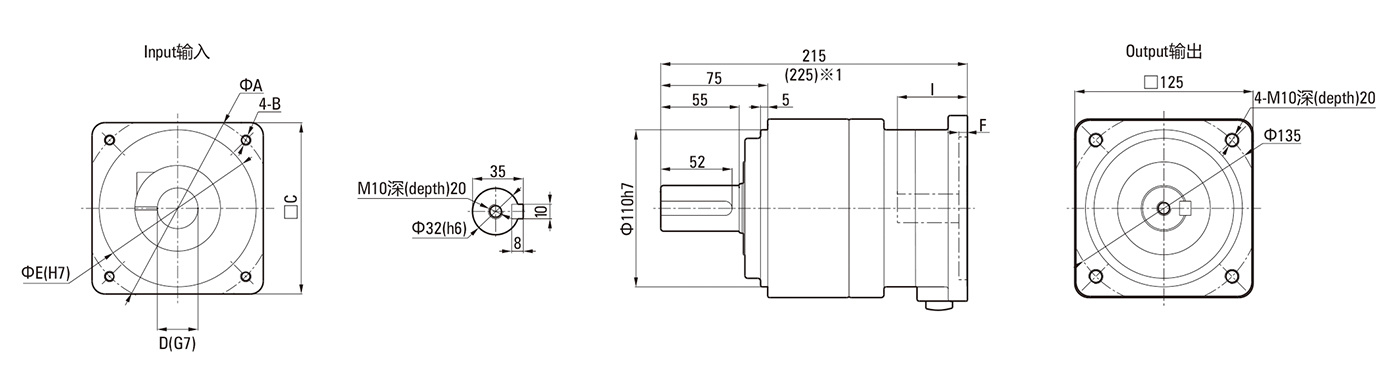
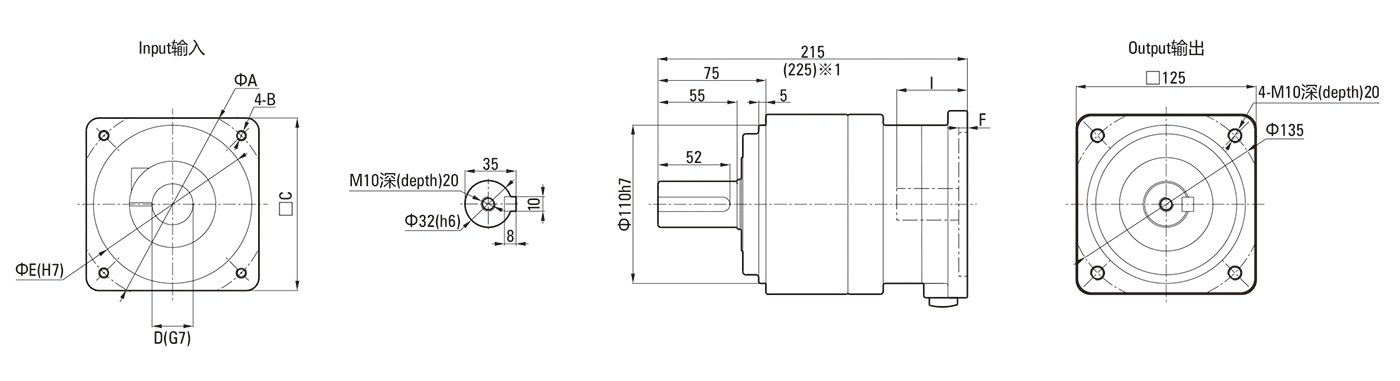
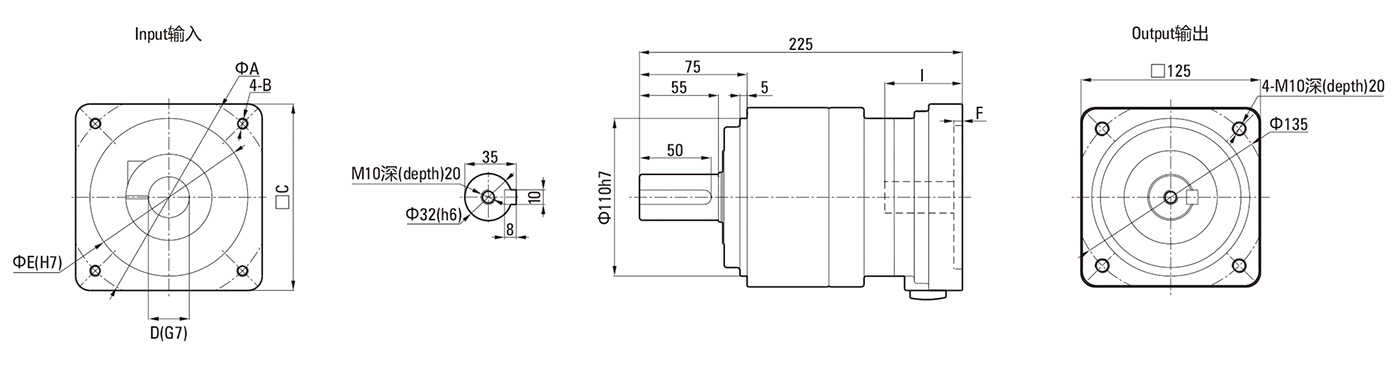
● 125ZDR3·5·9-2500
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 115 M8(profundidad)15 100 19 95 4 55 T2 115 M6(profundidad)15 100 24 95 4 55 T3 - - - - - - - · Peso bruto 11.5kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 3000W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 3000W 1/3 125 ZDR 3 3000 1000 23.7 71.2 1370 686 5.50 44.1 132 1/5 125 ZDR 5 3000 600 39.6 119 1670 833 3.48 56.8 171 1/9 125 ZDR 9 3000 333 73.0 219 1960 980 2.77 73.5 221 Nota1) En caso de adjuntar a un motor más allá de los modelos estándar (serie de coincidencia de motores), contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
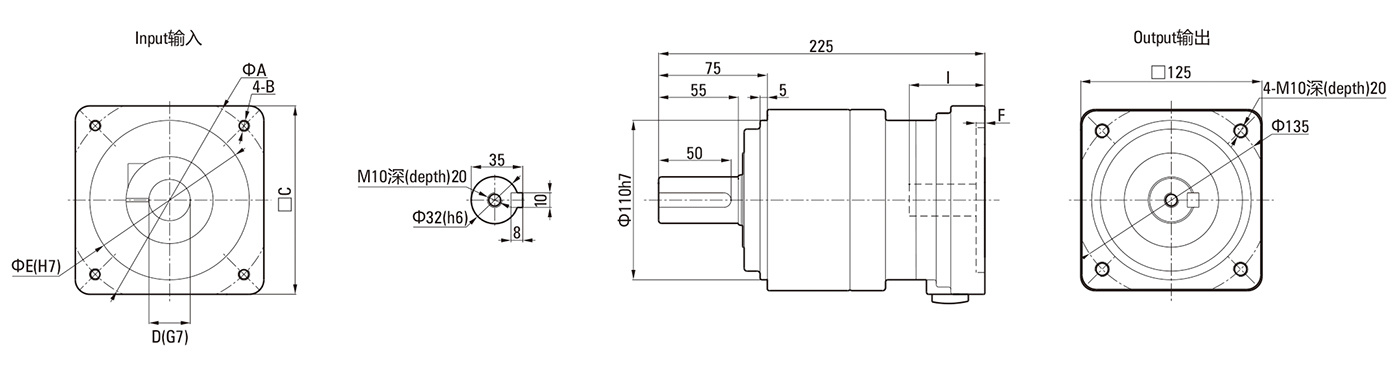
● 125ZDR3·5·9-3000
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 130 M8(profundidad)15 120 22 110 7 55 T2 145 M8(profundidad)15 130 28 110 7 65 T3 - - - - - - - · Peso bruto 12.0kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 3500W Y TABLA DE RENDIMIENTO
■ Tabla de Rendimiento (3,000rpm Cuando la Velocidad de Entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 3500W 1/3 125 ZDR 3 3500 1000 28.3 85.2 1370 686 5.50 44.1 132 1/5 125 ZDR 5 3500 600 47.2 141 1670 833 3.48 56.8 171 Nota1) En caso de adjuntar a un motor más allá de los modelos estándar (serie de coincidencia de motores), contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
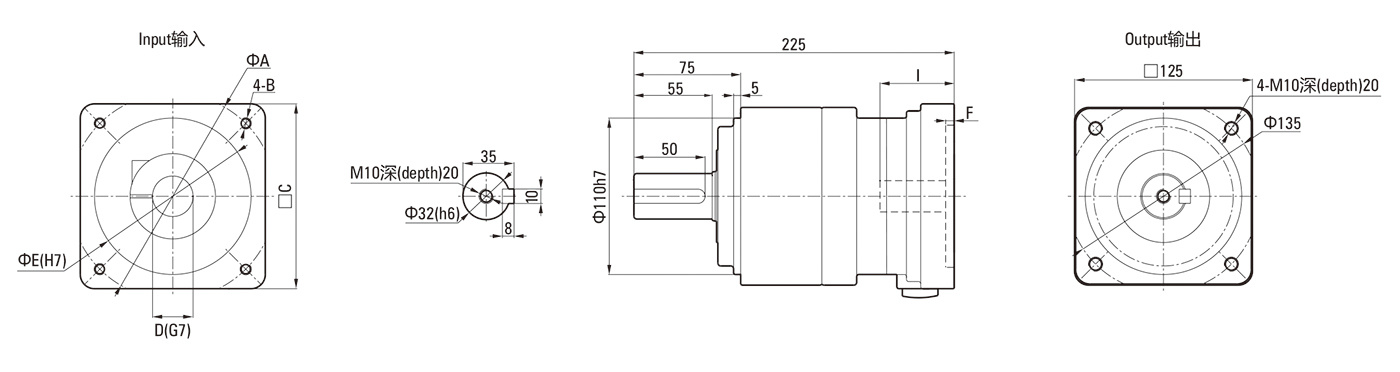
● 125ZDR3·5-3500
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 130 M8(profundidad)15 120 22 110 7 55 T2 - - - - - - - T3 145 M8(profundidad)15 130 28 110 7 65 · Peso bruto 12.0kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 4000W Y TABLA DE RENDIMIENTO
■ Tabla de Rendimiento ( 3,000rpm Cuando la Velocidad de Entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 4000W 1/3 125 ZDR 3 4000 1000 33.1 99.0 1370 686 5.78 44.1 132 1/5 125 ZDR 5 4000 600 55.3 166 1670 833 3.75 56.8 171 Nota1) En caso de adjuntar a un motor más allá de los modelos estándar (serie de coincidencia de motores), contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 125ZDR3·5-4000
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 145 M8(profundidad)15 130 24 110 7 65 T2 145 M8(profundidad)15 130 28 110 7 65 T3 - - - - - - - · Peso bruto 13.0kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 4500W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 4500W 1/3 125 ZDR 3 4500 1000 37.7 113 1370 686 5.78 44.1 132 Nota1) En caso de adjuntar a un motor más allá de los modelos estándar (serie de coincidencia de motores), contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 125ZDR3-4500
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 145 M8(profundidad)15 130 24 110 7 65 T2 - - - - - - - T3 - - - - - - - · Peso bruto 13.0kg
· Para detalles de T1~3, consulte la página 33DIBUJO DIMENSIONAL DE 5000W Y TABLA DE RENDIMIENTO
■ Tabla de rendimiento (3,000rpm时 Cuando la velocidad de entrada es 3000rpm)
Motor de entrada nominal Reducción
RelaciónModelo Salida
Velocidad del ejeEstándar
Par de salidaInstantáneo
Máximo par de salidaPermisible
Carga radialPermisible
Carga axialMomento de inercia interno
Del eje de entradaPermisible
Par de salidaMáx. instantáneo
Par de salida permisibleNúmero de tipo Modo Reducción
RelaciónMotor (rpm) (N.m) (N.m) (N) (N) (x10-4kg.m²) (N.m) (N.m) 5000W 1/3 125 ZDR 3 5000 1000 42.9 128 1370 686 5.78 44.1 132 Nota1) En caso de adjuntar a un motor más allá de los modelos estándar (serie de coincidencia de motores), contáctenos. (La forma de medir las dimensiones de la brida puede cambiar en algunos casos.)
Nota2) El momento de inercia de la conversión del eje de entrada se obtiene solo del reductor, por lo que no incluye el momento de inercia del motor.
Nota3) La velocidad máxima de entrada es 5000rpm, y generalmente se establece en 3000rpm o menos.
Nota4) La carga radial permisible se indica en el centro del eje de salida.
Nota5) Todos los valores están dentro del rango correspondiente a engranajes helicoidales.
Nota6) Para el procedimiento de ensamblaje del motor, consulte la página 31.
Nota7) La rotación del eje de salida es en la misma dirección que el motor.■ Dimensiones
● 125ZDR3-5000
● Tabla de dimensiones de brida detallada (Unidad:mm)
Tipo de motor A B C D E F I T1 145 M8(profundidad)15 130 24 110 7 65 T2 145 M8(profundidad)15 130 28 110 7 65 T3 145 M8(profundidad)15 130 28 110 7 65 · Peso bruto 13.0kg
· Para detalles de T1~3, consulte la página 33Related Products
MENSAJES
Si tiene alguna pregunta, puede dejarnos un mensaje. Tenemos profesionales para responderte. ¡Por favor, rellene la información de contacto correcta!
Contacto
Transmisión inteligente Co., Ltd. del líder de Ningbo Zhongda.
Añadir.: No. 185 Xinxing 1st Road, Cixi Industrial de alta tecnología
Zona del desarrollo, Ningbo
Tel:86-574-63537171
Fax:86-574-63534879
WhatsApp:86-19136773454
Correo electrónico: Trade20@zd-motor.comSíguenos en Social:





Derechos de autor©Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. Powered by www.300.cn SEO Licencia de negocio
-