
Esperamos poder proporcionarle servicios profesionales--Zhongda Líder


-
-
-
Motor de engranaje de corriente continua
Motor de engranaje sin escobillas de CC
Motor de engranaje de corriente continua planetario
Pequeño motor de engranaje de CA
Motor de engranaje hipoidales ZDF2, ZDF3
Reductor de Rueda de Pin Ciclóide RV
Reductor de transmisión armónica
PRODUCTOS
MOTOR REDUCTOR PLANETARIO ZDF
MOTOR REDUCTOR, también conocido como motor reductor, es un dispositivo de potencia que integra un mecanismo de transmisión por engranajes con un motor eléctrico. Los motores reductores tienen numerosas características y ventajas significativas. Tienen un diseño estructural compacto que permite una transmisión de potencia eficiente en un espacio limitado. Su sistema de transmisión por engranajes puede proporcionar un control preciso de la velocidad y el par, satisfaciendo las necesidades de varios escenarios de aplicación.Detalle
■ Dibujo Seccional
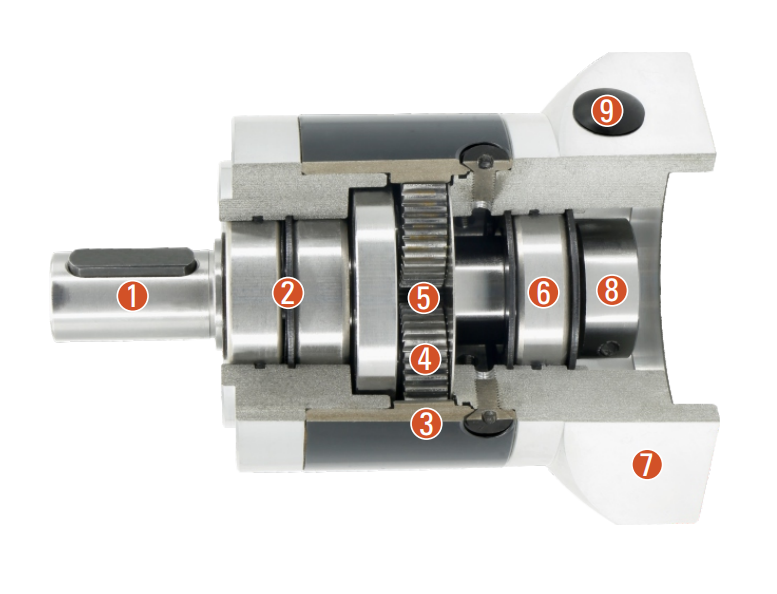
① Eje de salida
② Rodamiento para el eje de salida
③ Engranaje interno
④ Engranaje planetario
⑤ Rueda solar
⑥ Rodamiento para la rueda solar
⑦ Brida de motor adecuada
⑧ Sistema de sujeción de precisión
⑨ Orificio de montaje■ Tipo y Número de Modelo
Cabezal de engranaje de la serie ZD Motor Servo 
① Tamaño del marco del cabezal de engranaje: 80 ② Código de serie del cabezal de engranaje: ZDE: serie de brida de montaje redonda ZDWE: serie de brida de montaje redonda de entrada en ángulo recto ZDF: serie de brida de montaje cuadrada ZDWF: serie de brida de montaje cuadrada de entrada en ángulo recto ZDS: serie de alta rigidez ③ Relación de transmisión: Una etapa 3,4,5,8,10 Dos etapas 9,12,15,16,20,25,32,40,64 Tres etapas 60,80,100,120,160,200,256,320,512 ④ Cantidad de retroceso
Precisión (La carga del eje de salida es ±3% del par de salida permitido)Número de tipo de reductor Etapa Tipo estándar 40ZDE/F 1 12 minutos de arco 2 15 minutos de arco 3 18 minutos de arco 60ZDE/F
80ZDE/F
120ZDE/F
160ZDE/F1 8 minutos de arco 2 12 minutos de arco 3 15 minutos de arco 115ZDS
142ZDS
190ZDS1 8 minutos de arco 2 12 minutos de arco 60ZDWE/F 1 30 minutos de arco 2 35 minutos de arco 3 40 minutos de arco 80ZDWE/F
120ZDWE/F
160ZDWE/F1 25 minutos de arco 2 30 minutos de arco 3 35 minutos de arco ⑤ Tipo de eje de entrada S: Sobre bloqueo (0 misión) (Independientemente de si el motor con estrías puede usarlo.) S1: Bloqueo con anillo de bloqueo (Independientemente de si el motor con estrías puede usarlo.) S2: Bloqueo con estría (Eje de entrada con estría) K: Con estría A: Otro tipo (Por favor, contáctenos) ⑥Potencia del motor servo aplicable (W) ⑦ Tabla de coincidencia de brida de entrada y motor servo (P15) ■ Datos Técnicos
Tipo de producto 40 60 80 120 160 Relación de reducción Número de etapas Par de salida nominal N.M 4.5 12 40 80 400 3 6 16 50 110 450 4 6 16 110 450 5 5 15 45 100 400 8 4 12 40 80 305 10 / 40 100 210 / 9 2 16.5 40 100 210 700 12 16.5 40 100 210 700 15 20 44 120 260 800 16 20 44 120 260 800 20 18 40 110 230 700 25 20 44 120 260 800 32 18 40 110 230 700 40 7.5 18 45 100 400 64 16.5 40 100 210 / 60 3 20 44 120 260 / 80 20 44 120 260 / 100 16.5 40 100 210 / 120 20 44 120 260 / 160 18 40 110 230 / 200 20 44 120 260 / 256 18 40 110 230 / 320 7.5 18 45 100 / 512 Vida Hora 20,000 Par de parada instantánea N.M Dos veces el par de salida nominal Tipo de producto 40 60 80 120 160 Unidad Número de etapas Par radial máximo 160 450 900 2100 6000 N Par axial máximo 80 225 450 1050 3000 N Eficiencia de carga completa 96 % 1 94 2 90 3 Peso 0.4 0.9 2.1 6 18 Kg 1 0.5 1
.2.6 8 22 2 0.6 1.3 3.1 9.5 / 3 Temperatura de operación -25~+90 ℃ IP IP54 Tipo de lubricación Lubricación de por vida Tipo de montaje Cualquiera El par radial y axial máximo trabaja en la ubicación del centro del eje de salida cuando la velocidad de salida es 100 RPM.
■ Datos Técnicos
Tipo de producto 40 60 80 120 160 Relación de reducción Momento de inercia Kgcm² 0.031 0.135 0.77 2.63 12.14 3 0.022 0.093 0.52 1.79 7.78 4 0.019 0.078 0.45 1.53 6.07 5 0.017 0.065 0.39 1.32 4.63 8 0.015 0.054 0.34 1.14 3.52 10 / 0.131 0.74 2.62 / 9 0.022 0.088 0.50 2.56 7.47 12 0.019 0.077 0.44 1.79 6.65 15 0.022 0.088 0.50 1.75 7.47 16 0.019 0.075 0.44 1.50 6.65 20 0.019 0.075 0.44 1.49 5.81 25 0.017 0.064 0.39 1.30 4.50 32 0.016 0.064 0.39 1.30 4.50 40 0.016 0.064 0.39 1.30 4.50 64 0.019 0.075 0.50 1.50 / 60 0.019 0.075 0.50 1.50 / 80 0.019 0.075 0.44 1.49 / 100 0.016 0.064 0.39 1.30 / 120 0.016 0.064 0.39 1.30 / 160 0.016 0.064 0.39 1.30 / 200 0.016 0.064 0.39 1.30 256 0.016 0.064 0.39 1.30 / 320 0.016 0.064 0.39 1.30 / 512 Tipo de producto 40 60 80 120 160 Número de etapas Retroceso minutos de arco <12 <8 <8 <8 <8 1 <15 <12 <12 <12 <12 2 <18 <15 <15 <15 / 3 Tipo de producto 40 60 80 120 160 Rigidez torsional N.M/minuto de arco 0.7 1.8 4.5 12 38 Ruido dB(A) 55 58 60 65 70 Velocidad de entrada máxima min 4500 4500 4500 4500 4500 Velocidad de entrada recomendada min¹ 3000 3000 3000 3000 3000 1. El momento de inercia está relacionado con el eje de entrada.
2. Nivel de presión estándar de prueba de ruido, distancia 1m, medido en funcionamiento en vacío con una velocidad de entrada de 3000 rpm.■ Dimensiones
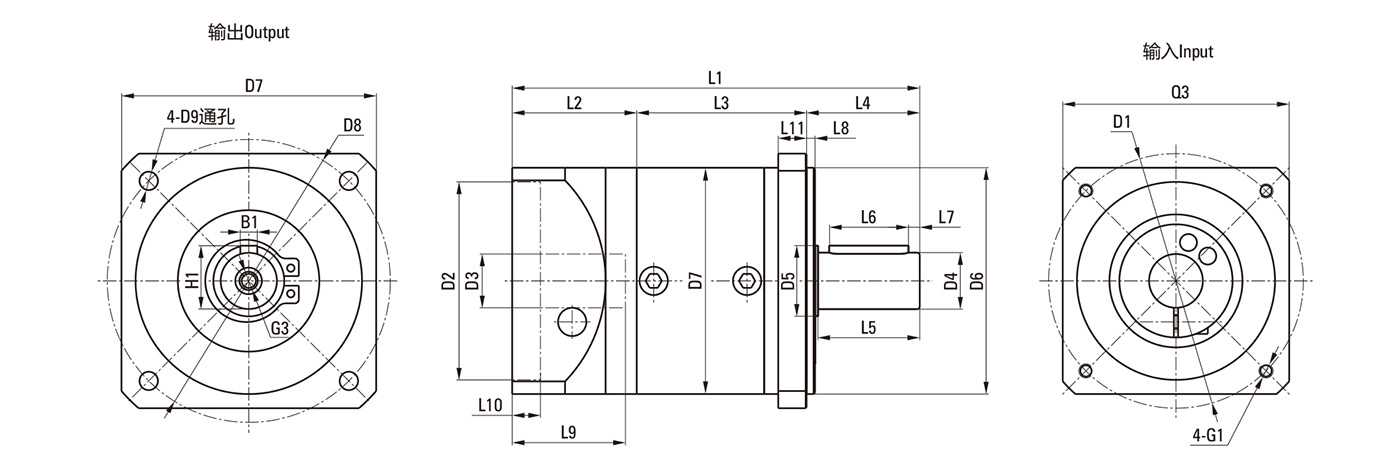
■ Unidad: mm
Tipo de producto 40ZDF 60ZDF 80ZDF 120ZDF 160ZDF Número de etapas 1 2 3 1 2 3 1 2 3 1 2 3 1 2 Longitud total L1 93.5 106.5 119 114 127 140 144 162 179.5 195.2 223 250.5 302 345.5 Longitud del cuerpo L3 39 52 64.5 46.5 59.5 72.5 60 78 95.5 73.7 101.5 129 116 159.5 Salida Longitud del eje de salida L4 26 35 40 55 87 Longitud de salida hasta el hombro del eje L5 23 30.5 36 50 80 Longitud de la llave L6 16 25 28 40 70 Longitud de la llave hasta el extremo del eje L7 3.5 2.5 4 5 5 Longitud del espigot L8 2 3 3 4 5 Grosor de la brida de salida L11 6 8 10 15 15 Diámetro del eje de salida D4 φ10h7 φ14h7 φ20h7 φ25h7 φ40h7 Diámetro del hombro del eje D5 φ12 φ17 φ25 φ35 φ55 Diámetro del espigot D6 φ26h7 φ50h7 φ80h7 φ110h7 φ130h7 Brida de salida D7 45 60 □90 120 J160/□175 Círculo de agujeros D8 φ50 φ70 φ100 φ130 φ185/φ200 Agujero de montaje D9 φ3.5 φ5.5 φ6.5 φ8.5 φ11/φ13.5 Ancho de la llave B1 3 5 6 8 12 Altura de la llave H1 11.2 16 22.5 28 43 Agujero central de tornillo G3 M3X9 M5X12 M6X16 M10X22 M12X25 Entrada Longitud de la brida de entrada L2 28.5 32 44 66.5 99 Longitud del eje del motor L9 26 30 40 58 79 Profundidad del espigot L10 6 10 10 10 10 Círculo de distribución de agujeros de montaje D1 Φ46 Φ70 φ90 φ145 φ200 Diámetro del espigot D2 φ30G7 φ50G7 φ70G7 φ110G7 φ114.3G7 Diámetro del eje de entrada D3 <φ8G7 ≤φ14G7 ≤φ19G7 ≤φ24G7 ≤φ35G7 Roscas de montaje G1 x profundidad M4X10 M5X12 M6X15 M8X22 M12X25 Brida de entrada 03 □40 □60 □80 □130 □175 ※ Tamaño de entrada hecho de acuerdo al tamaño del motor.
MOTOR REDUCTOR, también conocido como motor reductor, es un dispositivo de potencia que integra un mecanismo de transmisión de engranajes con un motor eléctrico.
Los motores reductores tienen numerosas características y ventajas significativas. Tienen un diseño estructural compacto que permite una transmisión de potencia eficiente en un espacio limitado. Su sistema de transmisión de engranajes puede proporcionar un control preciso de velocidad y par, satisfaciendo las necesidades de varios escenarios de aplicación.
En el campo industrial, los motores reductores se utilizan ampliamente en líneas de producción automatizadas, equipos de fabricación mecánica, etc. Pueden accionar diversos equipos mecánicos como cintas transportadoras, mezcladoras y ascensores, asegurando la estabilidad y eficiencia del proceso de producción. En el campo de la robótica, los motores reductores proporcionan energía para las articulaciones y movimientos de los robots, permitiéndoles realizar diversas tareas de manera flexible y precisa.
Related Products
MENSAJES
Si tiene alguna pregunta, puede dejarnos un mensaje. Tenemos profesionales para responderte. ¡Por favor, rellene la información de contacto correcta!
Contacto
Transmisión inteligente Co., Ltd. del líder de Ningbo Zhongda.
Añadir.: No. 185 Xinxing 1st Road, Cixi Industrial de alta tecnología
Zona del desarrollo, Ningbo
Tel:86-574-63537171
Fax:86-574-63534879
WhatsApp:86-19136773454
Correo electrónico: Trade20@zd-motor.comSíguenos en Social:





Derechos de autor©Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. Powered by www.300.cn SEO Licencia de negocio
-