
Esperamos poder proporcionarle servicios profesionales--Zhongda Líder


-
-
-
Motor de engranaje de corriente continua
Motor de engranaje sin escobillas de CC
Motor de engranaje de corriente continua planetario
Pequeño motor de engranaje de CA
Motor de engranaje hipoidales ZDF2, ZDF3
Reductor de Rueda de Pin Ciclóide RV
Reductor de transmisión armónica
PRODUCTOS
ZDFH0614
Categoría:
El robot industrial ZDFH0614 se encuentra a la vanguardia de la fabricación moderna, ofreciendo una precisión y eficiencia inigualables. Este robot avanzado aprovecha la tecnología de punta para garantizar un funcionamiento fluido y confiable en una amplia gama de aplicaciones industriales. Con su diseño de última generación, ofrece un rendimiento mejorado y longevidad, lo que lo hace ideal para industrias que exigen estándares rigurosos.Detalle
El ZDFH0614Robot industrialestá a la vanguardia de la fabricación moderna, ofreciendo una precisión y eficiencia inigualables. Este robot avanzado aprovecha la tecnología de punta para garantizar un funcionamiento fluido y confiable en una amplia gama de aplicaciones industriales. Con su diseño de última generación, ofrece un rendimiento mejorado y longevidad, lo que lo hace ideal para industrias que exigen estándares rigurosos.
En la industria automotriz, el ZDFH0614 sobresale en tareas que requieren movimientos de alta velocidad y alta precisión. Sus algoritmos de control superiores permiten una integración sin problemas con varios sistemas de automatización, asegurando una posicionamiento preciso y regulación de velocidad. Este nivel de precisión es crucial para procesos como líneas de ensamblaje, manejo de materiales y soldadura, donde incluso desviaciones menores pueden llevar a problemas de calidad o tiempo de inactividad.
La eficiencia energética es un diferenciador clave del ZDFH0614. Al minimizar las pérdidas de energía, este robot contribuye a reducir los costos operativos y el impacto ambiental. Su gestión eficiente de la energía no solo extiende la vida útil de los motores conectados, sino que también reduce la generación de calor, mejorando la confiabilidad general del sistema. Esto lo hace particularmente valioso en industrias enfocadas en la sostenibilidad y la rentabilidad.
La versatilidad es otra característica distintiva del ZDFH0614. Diseñado para soportar múltiples protocolos de comunicación, se integra sin esfuerzo en diversas redes industriales. Ya sea que se trate de buses de campo clásicos o estándares modernos de Ethernet industrial, este robot asegura una comunicación fluida y una fácil configuración. Esta adaptabilidad permite a los usuarios actualizar sus sistemas sin modificaciones significativas, proporcionando una solución a prueba de futuro.
Las características de seguridad son fundamentales en el ZDFH0614, incorporando protección contra sobrecorriente, gestión térmica y diagnóstico de fallos. Estos mecanismos de seguridad protegen tanto al robot como al equipo conectado, previniendo daños y asegurando un funcionamiento continuo en condiciones adversas. Este robusto marco de seguridad brinda tranquilidad a los operadores y mejora la confiabilidad general de los procesos industriales.
Las interfaces amigables para el usuario son una prioridad en el ZDFH0614. Controles intuitivos y pantallas claras simplifican la configuración, monitoreo y solución de problemas. Esta facilidad de uso minimiza los requisitos de capacitación y maximiza la productividad, permitiendo a los operadores concentrarse en tareas críticas en lugar de navegar por configuraciones complejas. La interfaz sencilla asegura que incluso los usuarios novatos puedan operar el robot con confianza.
En resumen, el Robot Industrial ZDFH0614 se destaca en el ámbito de la fabricación moderna debido a su precisión, eficiencia, versatilidad y diseño centrado en el usuario. Satisface las necesidades cambiantes de las industrias contemporáneas, ofreciendo una solución confiable y sostenible que mejora la excelencia operativa. A medida que las industrias continúan adoptando la innovación, el ZDFH0614 sigue siendo un pilar del progreso, impulsando hacia adelante el futuro de la automatización.
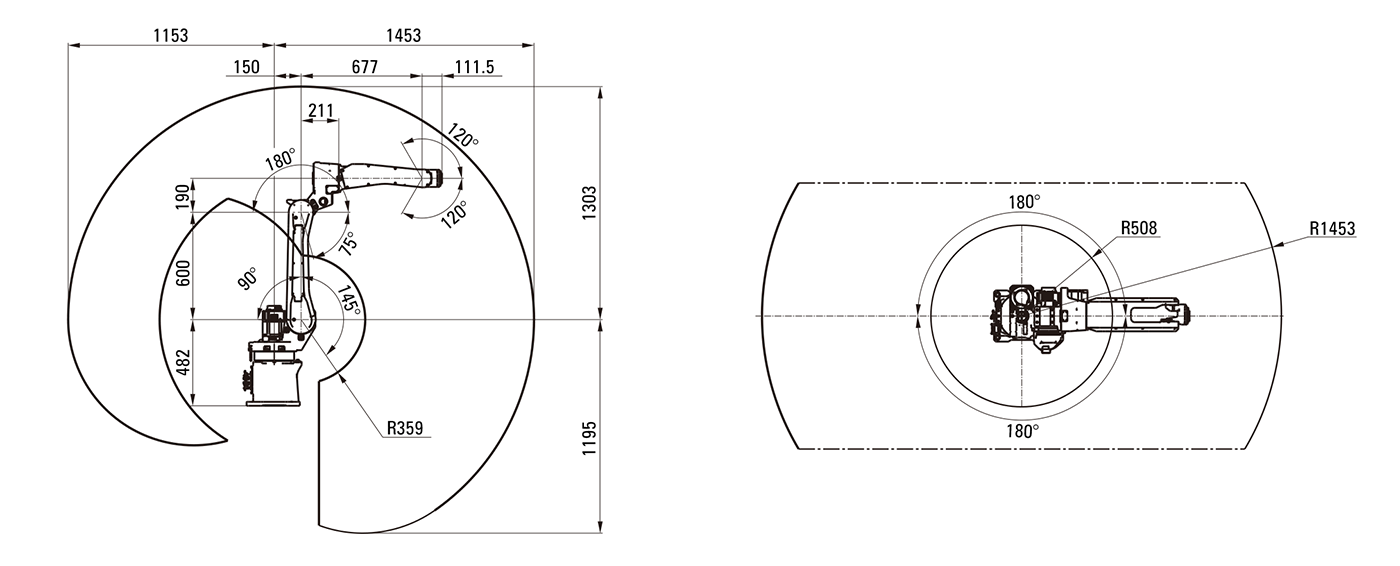
Modelo del robot ZDFH0614 Libertad 6 Posición Instalación en el suelo y suspendida
instalación en el techoVelocidad máxima de operación Eje J1 165°/seg Eje J2 155°/seg Eje J3 335°/seg Eje J4 290°/seg Eje J5 315°/seg Eje J6 925°/seg Rango máximo de operación Eje J1 ±180° Eje J2 -145°~+90° Eje J3 -75°~+180° Eje J4 ±170° Eje J5 ±120° Eje J6 ±360° Radio máximo de actividad 1453mm Carga máxima al final 6Kg Peso del cuerpo Aproximadamente 125Kg Par permitido J4 10.5N ·m J5 10.5N ·m J6 5.9N ·m Momento de inercia permitido J4 0.28kg ·m² J5 0.28kg ·m² J6 0.06kg ·m² Repetibilidad +/-0.05mm Tamaño de base del robot -290×300mm- -Temperatura ambiente- -0~45℃- -Humedad relativa- -20~80%RH- -Presión atmosférica- -89KPa~106KPa(altitud inferior a1000m)-
-Altitud inferior a1000m--Vibración, impacto, colisión- -≤0.5G- -Grado de protección- -IP54 (Muñeca IP65)- ■ Diagrama del alcance del trabajo
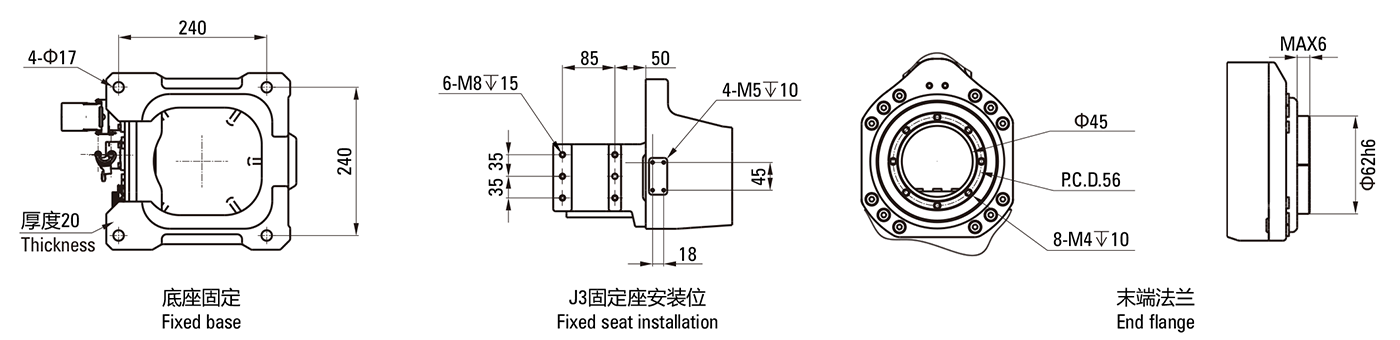
■ Diagrama del interfaz de instalación
Tensor de inercia del brazo conectado relativo al centro de masa
Objeto Base Asiento giratorio
componentesComponentes del brazo Asiento fijo del brazo pequeño
componentesBrazo pequeño
componentesMuñeca Consultar Sistema coordenado0 Sistema coordenado1 Sistema coordenado2 Sistema coordenado3 Sistema coordenado4 Sistema coordenado5 lxx(Kgmm²) / 1.8×10⁶ 2.3×10⁶ 5.3×10⁵ 3.8×10⁴ 1.1×10⁴ lyy(Kgmm²) / 2.0×10⁶ 2.2×10⁶ 6.4×10⁵ 7.2×10⁵ 9.3×10³ lzz(Kgmm²) / 7.8×10⁵ 1.0×10⁵ 3.7×10⁵ 7.3×10⁵ 3.9×10³ Acoplamiento conjunto
Conjunto J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Ecuación de relación de acoplamiento
(Coeficiente de acoplamiento)/ / / / / 11.7 Parámetros del reductor
Modelo 50C 42D 25D 32 Armónico 20 Armónico Caja de engranajes Relación de reducción del reductor 32.54 105 81 50 50 / Relación de reducción integral 97.62 104 80 102 102 35.1 Velocidad de salida nominal (r/min) 15 15 15 40 25 / Par nominal (N ·m) 490 412 245 76 34 / Par permisible para arranque
(N ·m) y detención1225 1029 612 216 74 / Par máximo instantáneo (N ·m) 2450 2058 1225 382 127 / Rigidez del momento (N ·m) 1764 1660 784 / / / Par máximo instantáneo (N ·m) 3528 3320 1568 / / / Parámetros del motor
Conjunto J1 J2 J3 J4 J5 J6 Modelo del motor 130 130 80 60 40 40 Potencia nominal (kW) 1.5 1.5 0.75 0.4 0.1 0.1 Voltaje nominal (V) 220 Corriente nominal (A) 7 7 5 2.6 0.85 0.85 Par nominal (N ·m) 4.77 4.77 2.38 1.27 0.31 0.31 Velocidad nominal (r/min) 3000 3000 3000 3000 3000 3000 Velocidad máxima (r/min) 3200 3200 4100 5000 5000 5400 Inercia del rotor (*10e-4kgm²) 9 9 1.2 0.4 0.06 0.06 Línea de retorno
Coeficiente de fuerza electromotriz (V/Kpm)48 48 36.2 33 25.2 25.2 Número de pares de polos 5 Encoder Valor de aislamiento de múltiples giros de acuerdo a Tamagawa de 17 bits Related Products
MENSAJES
Si tiene alguna pregunta, puede dejarnos un mensaje. Tenemos profesionales para responderte. ¡Por favor, rellene la información de contacto correcta!
Contacto
Transmisión inteligente Co., Ltd. del líder de Ningbo Zhongda.
Añadir.: No. 185 Xinxing 1st Road, Cixi Industrial de alta tecnología
Zona del desarrollo, Ningbo
Tel:86-574-63537171
Fax:86-574-63534879
WhatsApp:86-19136773454
Correo electrónico: Trade20@zd-motor.comSíguenos en Social:





Derechos de autor©Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. Powered by www.300.cn SEO Licencia de negocio
-