
Esperamos poder proporcionarle servicios profesionales--Zhongda Líder


-
-
-
Motor de engranaje de corriente continua
Motor de engranaje sin escobillas de CC
Motor de engranaje de corriente continua planetario
Pequeño motor de engranaje de CA
Motor de engranaje hipoidales ZDF2, ZDF3
Reductor de Rueda de Pin Ciclóide RV
Reductor de transmisión armónica
PRODUCTOS
Detalle
Modelo de robot ZDFH0615 Libertad 6
PosiciónInstalación en el suelo y suspendida
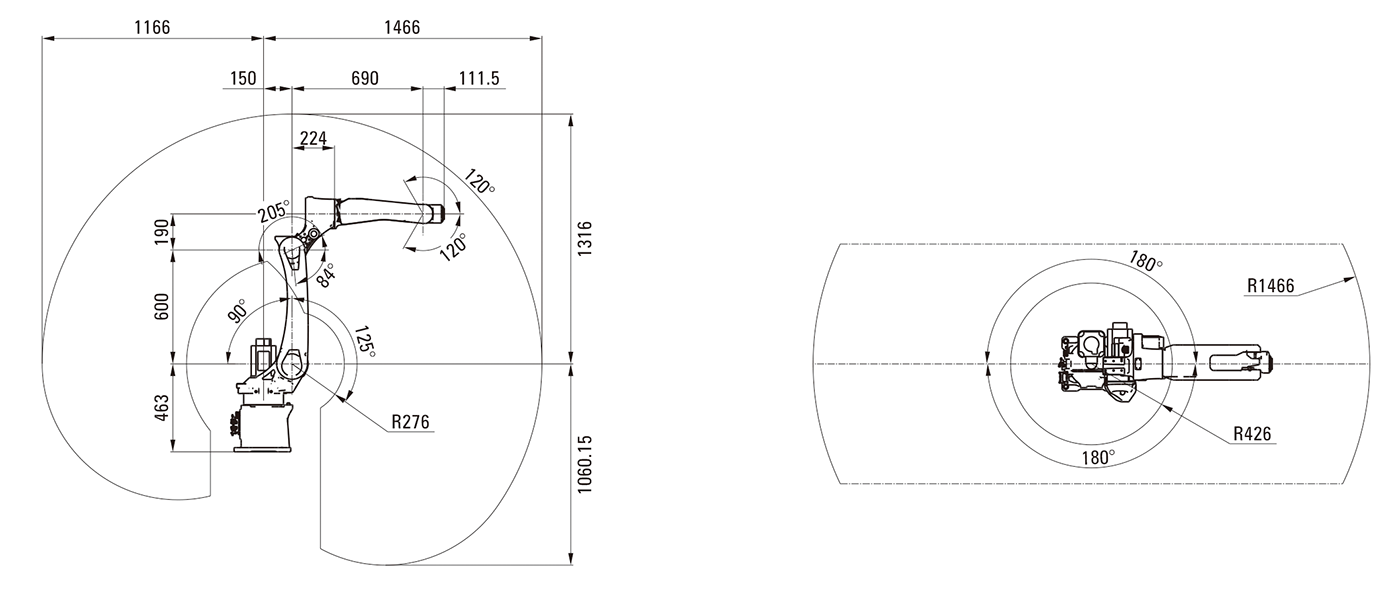
instalación en el techoVelocidad máxima de operación Eje J1 165°/seg Eje J2 155°/seg Eje J3 200°/seg Eje J4 290°/seg Eje J5 315°/seg Eje J6 925°/seg Rango máximo de operación Eje J1 ±180° Eje J2 -125°~+90° Eje J3 -84°~+205° Eje J4 ±170° Eje J5 ±120° Eje J6 ±360° Radio máximo de actividad 1466mm Carga máxima en el extremo 6Kg Peso del cuerpo Aproximadamente 116Kg Par permitido J4 10.5N ·m J5 10.5N ·m J6 5.9N ·m Momento de inercia permitido J4 0.28kg ·m² J5 0.28kg ·m² J6 0.06kg ·m² Repetibilidad ±0.05mm Tamaño de la base del robot 290×300mm Temperatura ambiente 0~45℃ Humedad relativa 20~80%RH Presión atmosférica (89KPa~106KPa) por debajo de los 1000m
Altitude below 1000mVibration,impact,collision <=0.5G Protection grade P54( Wrist IP65) ■ Work scope diagram
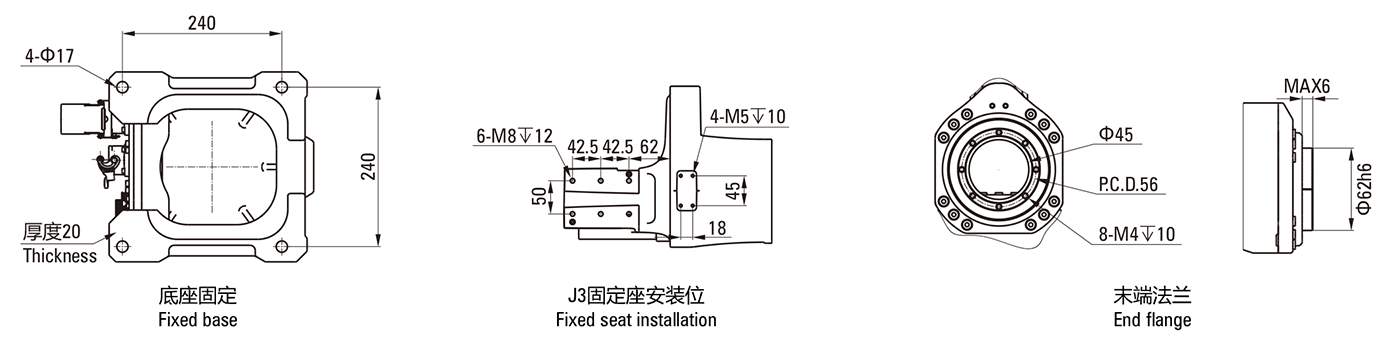
■ Installation interface diagram
■ Inertia tensor of the connecting rod relative to the center of mass
Object Base Rotating seat
componentsBoom components Small armfixed seat
componentscomponents Wrist Consult Coordinate system 0 Coordinate system 1 Coordinate system 2 Coordinate system 3 Coordinate system 4 Coordinate system 5 lxx(Kgmm²) / 1.8×10⁶ 1.4×10⁶ 1.2×10⁵ 3.8×10⁴ 1.1×10⁴ lyy(Kgmm²) / 1.3×10⁶ 9.7×10⁶ 1.6×10⁵ 7.2×10⁵ 9.3×10³ lzz(Kgmm²) / 9.5×10⁵ 8.6×10⁵ 1.8×10⁵ 7.3×10⁵ 3.9×10³ Acoplamiento de juntas
Junta J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Ecuación de relación de acoplamiento
(Coeficiente de acoplamiento)/ / / / / 11.7 ■ Parámetros del reductor
Modelo 50C 42D 25D 32 Armónico 20 Armónico Caja de engranajes Relación de reducción del reductor 32.54 105 126 50 50 / Relación de reducción integral 97.62 105 126 102 102 35.1 Velocidad de salida nominal (r/min) 15 15 15 25 25 / Par nominal (N ·m) 490 412 245 76 25 / Par permisible para arranque
y detención (N ·m)1225 1029 612 216 56 / Par de torsión máximo instantáneo (N ·m) 2450 2058 1225 382 98 / Rigidez del momento (N ·m) 1764 1660 784 / / / Par de torsión máximo instantáneo (N ·m) 3528 3320 1568 / / / ■ Parámetros del motor
Junta J1 J2 J3 J4 J5 J6 Modelo de motor 130 130 80 60 40 40 Potencia nominal (kW) 2 2 0.75 0.4 0.1 0.1 Voltaje nominal (V) 220 Corriente nominal (A) 10 10 5 2.6 0.85 0.85 Par de torsión nominal (N ·m) 6.36 6.36 2.38 1.27 0.31 0.31 Velocidad nominal (r/min) 3000 3000 3000 3000 3000 3000 Velocidad máxima (/min) 3200 3200 3200 5000 5400 5400 Inercia del rotor (*10e-4kgm²) 16.5 16.5 1.2 0.4 0.06 0.06 Línea de retorno
Coeficiente de fuerza electromotriz (V/Krpm)50.5 50.5 36.2 33 25.2 25.2 Número de pares de polos 5 Encoder Valor de aislamiento de múltiples giros de 17 bits acuerdo Tamagawa Related Products
MENSAJES
Si tiene alguna pregunta, puede dejarnos un mensaje. Tenemos profesionales para responderte. ¡Por favor, rellene la información de contacto correcta!
Contacto
Transmisión inteligente Co., Ltd. del líder de Ningbo Zhongda.
Añadir.: No. 185 Xinxing 1st Road, Cixi Industrial de alta tecnología
Zona del desarrollo, Ningbo
Tel:86-574-63537171
Fax:86-574-63534879
WhatsApp:86-19136773454
Correo electrónico: Trade20@zd-motor.comSíguenos en Social:





Derechos de autor©Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. Powered by www.300.cn SEO Licencia de negocio
-