
Esperamos poder proporcionarle servicios profesionales--Zhongda Líder


-
-
-
Motor de engranaje de corriente continua
Motor de engranaje sin escobillas de CC
Motor de engranaje de corriente continua planetario
Pequeño motor de engranaje de CA
Motor de engranaje hipoidales ZDF2, ZDF3
Reductor de Rueda de Pin Ciclóide RV
Reductor de transmisión armónica
PRODUCTOS
Detalle
Modelo de robot ZDGT2518 Libertad 6 Posición Instalación en el suelo y suspendida
Instalación en el techoEje J1 145°/seg Eje J2 115°/seg Velocidad máxima de operación Eje J3 150°/seg Eje J4 347°/seg Eje J5 280°/seg Eje J6 380°/seg Rango máximo de operación Eje J1 ±180° Eje J2 -125°~+90° Eje J3 -77°~+202° Eje J4 ±180° Eje J5 ±125° Eje J6 ±360° Radio máximo de actividad 1808mm Carga máxima en el extremo 25Kg Peso del cuerpo Aproximadamente 191Kg Par permitido J4 52N ·m J5 52N ·m J6 32N ·m Momento de inercia permitido J4 2.40kg-m² J5 2.40kg-m² J6 1.20kg ·m² Repetibilidad ±0.08mm Tamaño de la base del robot 300×420mm Temperatura ambiente 0~45℃ Humedad relativa 20~80%RH Presión atmosférica 89KPa~106KPa (Altitud por debajo de 1000m) Vibración, impacto, colisión <=0.5G Grado de protección (P54) Muñeca IP67 [Diagrama del alcance de trabajo]
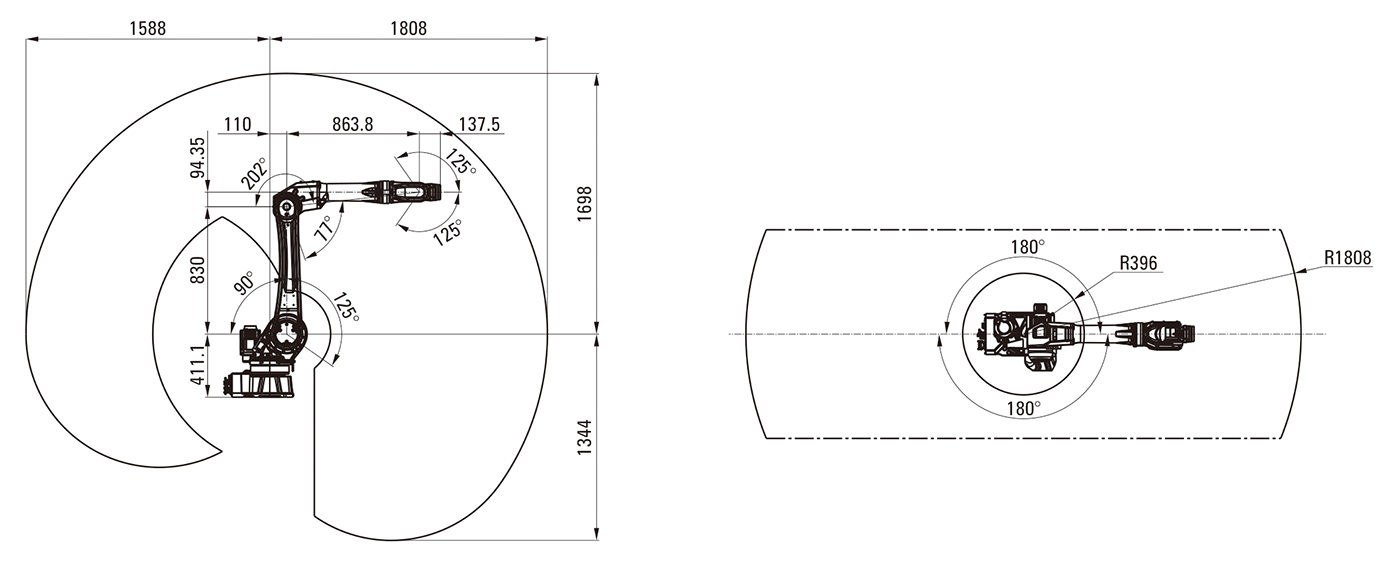
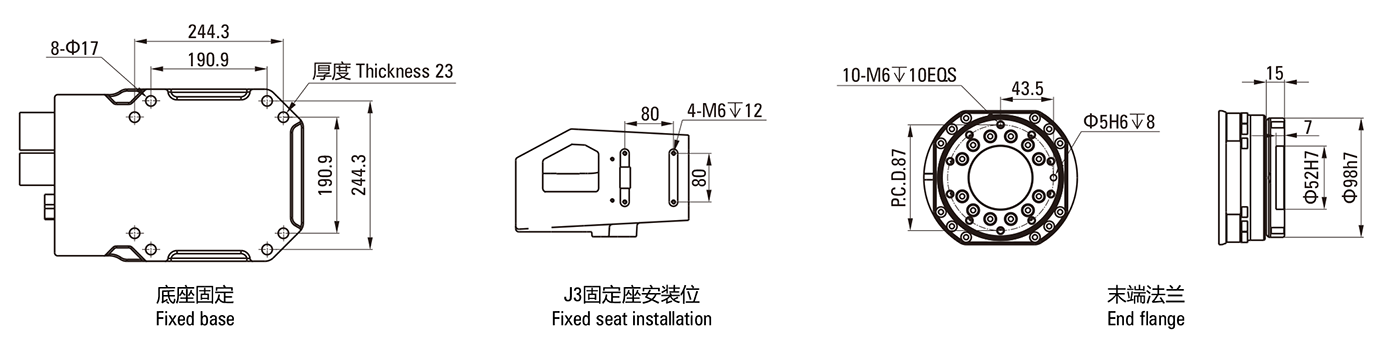
[Diagrama de la interfaz de instalación]
[Tensor de inercia del brazo de conexión relativo al centro de masa]
[Objeto] [Base] [Asiento giratorio]
[Componentes][Componentes del brazo] [Asiento fijo del brazo pequeño]
[Componentes][Brazo pequeño]
[Componentes][Muñeca] [Consultar] [Sistema de coordenadas 0] [Sistema de coordenadas 1] [Sistema de coordenadas 2] [Sistema de coordenadas 3] [Sistema de coordenadas 4] [Sistema de coordenadas 5] (lxx(Kgmm²)) / (2.1×10⁶) (9.4×10⁵) (3.8×10⁶) (8.8×10⁴) (2.9×10⁴) (lyy(Kgmm²)) / (2.7×10⁶) (1.2×10⁷) (2.6×10⁵) (7.8×10⁵) (3.1×10³) (lzz(Kgmm²)) / (1.6×10⁶) (1.1×10⁷) (3.9×10⁵) (7.2×10⁵) (2.9×10⁴) [Acoplamiento de juntas]
[Junta] J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 [Ecuación de relación de acoplamiento]
[(Coeficiente de acoplamiento)]/ / / (53.5:1) (79:1) (79:1) [Parámetros del reductor]
[Modelo] 100C 250BX 42D 10C 120BX 120BX [Relación de reducción del reductor] 36.75 111 105 27 53.5 79 [Relación de reducción integral] 102.9 111 104 86.4 107 79 [Velocidad nominal (r/min)] 15 15 15 15 30 30 [Par nominal (N ·m)] 980 1078 412 98 58 58 [Par permisible para arranque]
[y detención (N ·m)]2450 2695 1029 245 117 117 [Par máximo instantáneo (N ·m)] 4900 5390 2058 490 294 294 [Rigidez del momento (N ·m)] 2450 2940 1660 386 196 196 [Par máximo instantáneo (N ·m)] 4900 5880 3320 1372 392 392 [Parámetro del motor]
[Junta] J1 J2 J3 J4 J5 J6 [Modelo del motor] 130 180 130 60 60 60 Potencia nominal(kW) 2 3 1.5 0.4 0.4 0.4 Voltaje nominal(V) 220 Corriente nominal(A) 10 18 7 2.6 2.6 2.6 [Par nominal (N ·m)] 6.36 14.3 4.77 1.27 1.27 1.27 Velocidad nominal(r/min) 3000 2000 3000 3000 3000 3000 Velocidad máxima(r/min) 3000 2200 3100 4500 4500 4500 Inercia del rotor(*10e-4kgm²) 16.5 51 9 0.4 0.4 0.4 Línea de retorno
Coeficiente de fuerza electromotriz(V/Krpm)50.5 52.8 48 33 33 33 Número de pares de polos 5 Encoder Valor de aislamiento de 17 bits multi vuelta acuerdo Tamagawa Related Products
MENSAJES
Si tiene alguna pregunta, puede dejarnos un mensaje. Tenemos profesionales para responderte. ¡Por favor, rellene la información de contacto correcta!
Contacto
Transmisión inteligente Co., Ltd. del líder de Ningbo Zhongda.
Añadir.: No. 185 Xinxing 1st Road, Cixi Industrial de alta tecnología
Zona del desarrollo, Ningbo
Tel:86-574-63537171
Fax:86-574-63534879
WhatsApp:86-19136773454
Correo electrónico: Trade20@zd-motor.comSíguenos en Social:





Derechos de autor©Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. Powered by www.300.cn SEO Licencia de negocio
-